



版權(quán)說明:本文檔由用戶提供并上傳,收益歸屬內(nèi)容提供方,若內(nèi)容存在侵權(quán),請進行舉報或認領
文檔簡介
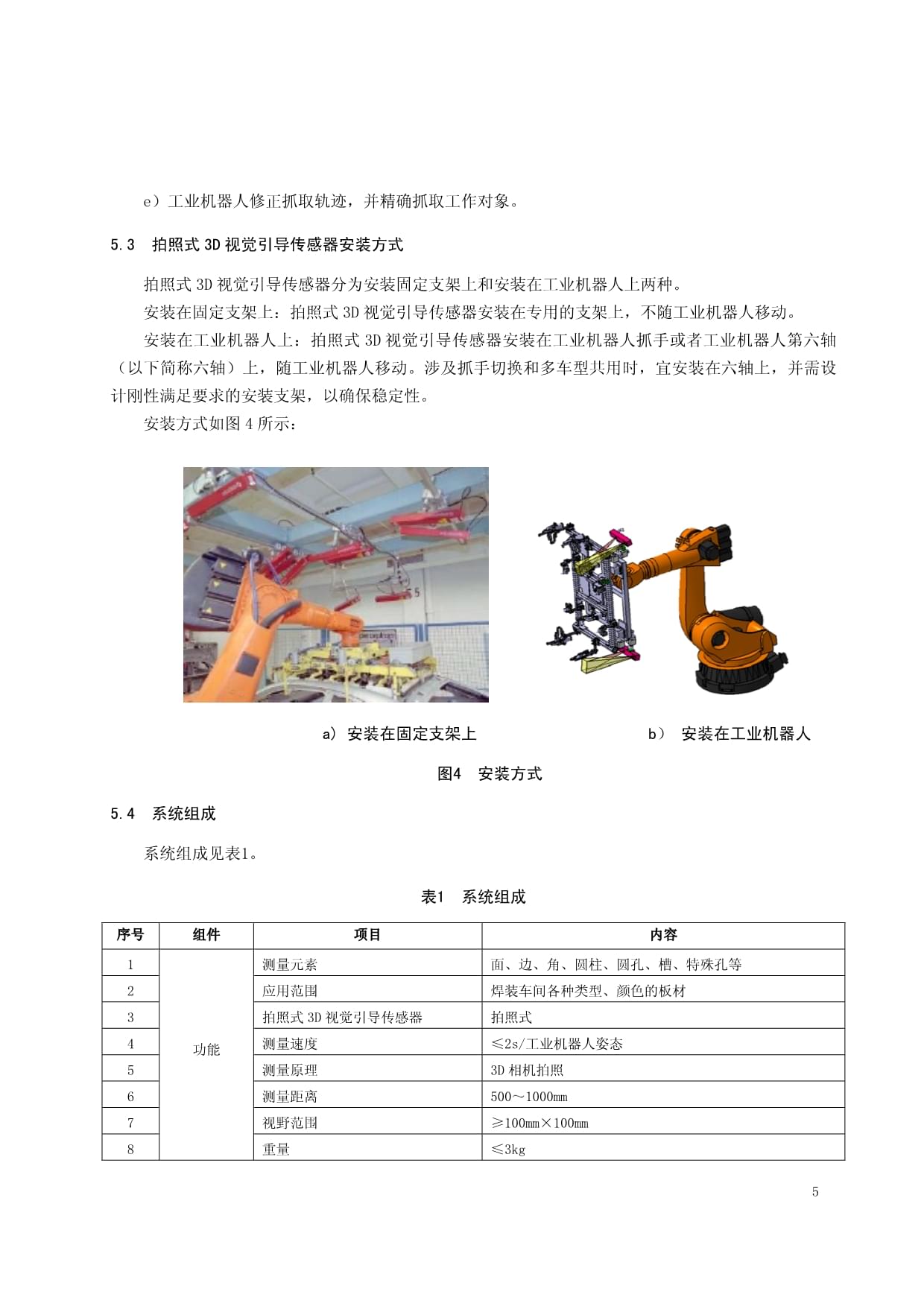
智能視覺引導安裝系統(tǒng)技術(shù)要求范圍本文件規(guī)定了智能視覺引導系統(tǒng)基本組成、系統(tǒng)原理、定位原理、運行方式、系統(tǒng)硬件與軟件要求、設備清單及技術(shù)參數(shù)等。本文件適用于廣西行政區(qū)域內(nèi)汽車白車身的自動化焊裝生產(chǎn)線、風擋玻璃自動化安裝導入的工業(yè)機器人視覺引導系統(tǒng)設備及相關組件。規(guī)范性引用文件本文件沒有規(guī)范性引用文件。術(shù)語和定義下列術(shù)語和定義適用于本文件。汽車白車身Automobilebodyinwhite汽車白車身是指完成焊接但未涂裝之前的車身,不包括四門兩蓋等運動件。智能視覺引導系統(tǒng)Intelligentvisualguidancesystem利用智能視覺檢測技術(shù)和工業(yè)機器人運動學原理,實現(xiàn)工作對象的拍照式3D定位,引導工業(yè)機器人根據(jù)工作對象的位置變化,調(diào)整工作軌跡,以促進生產(chǎn)效率、提高生產(chǎn)質(zhì)量。拍照式3D視覺引導傳感器Photographic3Dvisualguidancesensor高精度的拍照式3D視覺引導傳感器主要用于取件工業(yè)機器人的“抓手”對工作對象的抓取等操作的視覺感知,結(jié)構(gòu)緊湊,拍照范圍廣。拍照式3D定位Photographic3Dpositioning利用拍照式3D視覺引導傳感器拍照,通過特征提取和特征匹配,并結(jié)合特征之間的相對位置信息,實現(xiàn)工作對象在拍照式3D視覺引導傳感器建立的坐標系下的3D定位(在參考坐標系x、y、z方向上的移動和旋轉(zhuǎn))。智能視覺引導系統(tǒng)系統(tǒng)原理視覺引導系統(tǒng)結(jié)合了視覺檢測技術(shù)和工業(yè)機器人運動學原理,旨在為取件工業(yè)機器人安裝“眼睛”,通過激光測量或圖像處理等算法運算出工件實際3D姿態(tài)與理論基準3D姿態(tài)的偏差(x,y,z,Rx,Ry,Rz),再反饋給取件工業(yè)機器人調(diào)整運動軌跡,解決取件工業(yè)機器人只能單純地重復示教軌跡的限制,使其能根據(jù)被操作工件的位置變化實時調(diào)整工作軌跡,促進生產(chǎn)效率,提升生產(chǎn)質(zhì)量。拍照式3D定位原理,基于特征點的拍照式位姿確定方法,通過已經(jīng)經(jīng)過標定的相機對目標拍照,利用目標圖像上至少4個非共線特征點的圖像坐標,以及特征點在空間中相對位置關系,建立目標約束方程,求解目標與相機間的相對位置和相對姿態(tài),如圖1所示。圖1拍照式3D定位原理利用工作對象上的特征點間幾何關系的基本思想是利用幾何模型來表示物體的結(jié)構(gòu)和形狀,并通過提取某些物體特征點,在模型和圖像之間建立起對應關系,然后通過幾何或者其它方法實現(xiàn)物體空間姿態(tài)的估計。基本組成視覺引導系統(tǒng)硬件包含:圖像處理工控機、拍照式3D視覺引導傳感器、安裝于抓具上的一體式攝像頭、圖像處理工控機通過I/O和網(wǎng)線與工業(yè)機器人通訊的線路。視覺引導系統(tǒng)基本構(gòu)成如圖2所示。圖2引導系統(tǒng)基本構(gòu)成視覺引導系統(tǒng)軟件包含:測量控制軟件和數(shù)據(jù)查詢與分析軟件。根據(jù)工位工藝情況,為增強功能、集約配置、優(yōu)化功能與成本,視覺引導系統(tǒng)的設備結(jié)構(gòu)配置可擴展為圖3所示。圖3擴展的視覺引導系統(tǒng)設備結(jié)構(gòu)配置例如:汽車白車身左、右側(cè)圍焊合總成視覺引導方案,可以設計為左、右側(cè)圍焊合總成各一套獨立的視覺系統(tǒng),每個抓手支架上安裝3個視覺傳感器,考慮到左、右側(cè)圍焊合總成上件位置距離不遠,為了節(jié)約成本和小型化設計,兩個視覺工控機統(tǒng)一放置于一個控制柜內(nèi),共用一臺顯示器顯示操作界面(支持切換)。運行方式拍照計算偏差與軌跡修正取件工業(yè)機器人每運動1次,視覺傳感器同時對工作對象上特征孔進行拍照,利用3D視覺引導算法計算工作對象位置及角度的偏移,并反饋修正取件工業(yè)機器人的抓取軌跡。視覺引導取件流程視覺引導取件流程如下要求:a)工業(yè)機器人運動至工作對象前約800mm處。b)工業(yè)機器人運動1次,拍照式3D視覺傳感器對工作對象4處不同的特征孔進行拍照。c)利用3D視覺引導算法,確定工作對象的位置及角度偏移。d)計算工業(yè)機器人運動修正值,反饋至工業(yè)機器人。e)工業(yè)機器人修正抓取軌跡,并精確抓取工作對象。拍照式3D視覺引導傳感器安裝方式拍照式3D視覺引導傳感器分為安裝固定支架上和安裝在工業(yè)機器人上兩種。安裝在固定支架上:拍照式3D視覺引導傳感器安裝在專用的支架上,不隨工業(yè)機器人移動。安裝在工業(yè)機器人上:拍照式3D視覺引導傳感器安裝在工業(yè)機器人抓手或者工業(yè)機器人第六軸(以下簡稱六軸)上,隨工業(yè)機器人移動。涉及抓手切換和多車型共用時,宜安裝在六軸上,并需設計剛性滿足要求的安裝支架,以確保穩(wěn)定性。安裝方式如圖4所示:安裝在固定支架上b)安裝在工業(yè)機器人圖4安裝方式系統(tǒng)組成系統(tǒng)組成見表1。系統(tǒng)組成序號組件項目內(nèi)容1功能測量元素面、邊、角、圓柱、圓孔、槽、特殊孔等2應用范圍焊裝車間各種類型、顏色的板材3拍照式3D視覺引導傳感器拍照式4測量速度≤2s/工業(yè)機器人姿態(tài)5測量原理3D相機拍照6測量距離500~1000mm7視野范圍≥100mm×100mm8重量≤3kg9系統(tǒng)綜合引導精度≤±0.5mm10傳感器安裝方式安裝在固定支架上或工業(yè)機器人上11控制上位機獨立機柜控制拍照式3D視覺引導傳感器12系統(tǒng)軟件多車型畫面切換功能支持,不少于5款13更改參數(shù)確認提示功能支持,以防誤改參數(shù)14數(shù)據(jù)儲存功能推薦存儲時間不小于2年15示教功能可對測量系統(tǒng)進行示教,具有完整的測量算法應對車身上各個特征16監(jiān)控功能具備對測量數(shù)據(jù)的監(jiān)控功能,可實時監(jiān)控被測工件的測量數(shù)據(jù)狀態(tài)17分析功能具有MicrosoftEXCEL或WPS表格等類型的數(shù)據(jù)報告形式,幫助使用者進行數(shù)據(jù)分析,支持數(shù)據(jù)導出18用戶多權(quán)限管理支持19支持語言中文、英文等20系統(tǒng)硬件柜體帶冷凝水自蒸發(fā)式空調(diào)21顯示器19吋彩色顯示器22工控機處理器:i7以上內(nèi)存:16GB以上硬盤容量:1TB以上網(wǎng)卡:100/1000bpsI/O接口:含DP、RS23223硬盤雙硬盤RAID陣列,硬盤容量不小于1TB24網(wǎng)絡接口主流工業(yè)通訊協(xié)議,如Profinet、Ethernet等25應急電源內(nèi)置的后備電源(UPS)來防止突然掉電26輸入電源要求AC220~230V,50/60Hz表1系統(tǒng)組成(續(xù))序號組件項目內(nèi)容27環(huán)境條件環(huán)境溫度-5°~45℃28環(huán)境濕度10%~90%29照明條件無太陽光和弧焊光直射運行狀態(tài)信息記錄上位機在運行過程中,可自動生成日志,記錄控制器運行狀態(tài)信息,日志可用專用或通用工具調(diào)取。系統(tǒng)硬件及軟件引導精度視覺引導系統(tǒng)應保證測定工作對象在抓取時不變形,綜合引導精度≤±0.5mm。硬件傳感器應安裝保護罩蓋,預防機械損傷。單個測量傳感器的更換應在不重新標定整個工位的情況下,實現(xiàn)功能恢復。傳感器在更換后的安裝應在沒有復雜輔助設備(激光跟蹤儀、經(jīng)緯測量儀)的情況下可以進行。應在不更換測量傳感器的情況下可以更換其線纜和電控模塊,同時不允許出現(xiàn)對整個工位的重新標定。固定式傳感器應固定在一個可調(diào)的萬向節(jié)頭上,傳感器的位置應在半緊固狀態(tài)下可進行微調(diào)。傳感器的首次校準過程和所采用的技術(shù)應進行詳細描述并存檔。軟件應采用在汽車工業(yè)批量生產(chǎn)中已投入使用的操作軟件。視覺引導軟件包含測量控制軟件和數(shù)據(jù)查詢與分析軟件,可實現(xiàn)引導狀態(tài)實時監(jiān)控,引導結(jié)果具備可視化界面,同時可對引導數(shù)據(jù)進行統(tǒng)計管理,并可導出固定格式的數(shù)據(jù)。所有系統(tǒng)設置,測量數(shù)據(jù)和關聯(lián)數(shù)據(jù)應可以輸出和存儲(不是通過截屏),可以自由選擇報告種類進行打印。應給出趨勢信息,以防止超差(報警極限及干預極限)。操作人員應可以自由進行靈敏度的調(diào)節(jié)。實時數(shù)據(jù)顯示:在一個測量循環(huán)完成后,顯示被測點與理論值的偏差。測量點數(shù)據(jù)查詢、分析和統(tǒng)計功能:測點誤差在三個方向上的變化曲線或誤差統(tǒng)計圖,所有測量點的測量結(jié)果進行實時顯示,按月或按年對測量點的合格率進行統(tǒng)計,并可輸出統(tǒng)計圖數(shù)據(jù)與圖線輸出。按班次、日、月或按年對測量點的合格率進行統(tǒng)計,并可輸出統(tǒng)計圖。系統(tǒng)參考清單以汽車白車身車身左、右側(cè)圍焊合件方案說明。左右側(cè)圍各一套獨立的視覺系統(tǒng),每個六軸支架上安裝3個傳感器,兩個視覺工控機統(tǒng)一放置于一個控制柜內(nèi),共用一臺顯示器顯示操作界面(支持切換),參考圖3。智能視覺引導系統(tǒng)設備參考清單見表2。智能視覺引導系統(tǒng)設備清單序號設備名稱數(shù)量單位使用規(guī)格備注1拍照式3D視覺引導傳感器6個2控制柜工控機2個處理器:i7以上;內(nèi)存:16GB以上;硬盤容量:1TB以上;網(wǎng)卡:100/1000Mbps;I/O接口:含DP、RS232。顯示器1個19吋彩色顯示器(含DP接口)適合在標準機柜內(nèi)安裝交換機2個支持Profinet、Ethernet總線進行通訊。柜體1個帶冷凝水自蒸發(fā)式空調(diào)。滿足使用,預制接頭。UPS后備電源1套3電纜若干4系統(tǒng)軟件1套支持兩套系統(tǒng)切換監(jiān)控,不支持配備兩套。5傳感器安裝支架2套6其他必要組件技術(shù)參數(shù)智能視覺引導系統(tǒng)技術(shù)參數(shù)見表3。技術(shù)參數(shù)表序號組件項目內(nèi)容1系統(tǒng)功能參數(shù)要求檢測項目定位工作對象沿X、Y、Z方向位移和繞X、Y、Z轉(zhuǎn)動共6個自由度。2應用范圍汽車白車身焊裝、總裝車間不同工作對象抓件、放件。3拍照距離500~1000mm。4拍照范圍700×700~1000×1000mm。5允許最大綜合偏移量±70mm的位置偏移;±5°的工作對象偏轉(zhuǎn)。6視覺引導綜合精度優(yōu)于±0.5mm。7系統(tǒng)拍照及處理時間≤2s。表3技術(shù)參數(shù)表(續(xù))序號組件項目內(nèi)容8拍照式3D視覺引導傳感器傳感器重復性/精度:±0.02mm/±0.05mm9相機與光源設計450nm藍光光源10傳感器保護片安裝方式11系統(tǒng)軟件支持語言中文、英文等12區(qū)域索引功能具備13實時數(shù)據(jù)儲存功能具備,1個月以上14用戶多權(quán)限管理支持15引導實時狀態(tài)監(jiān)控支持16引導結(jié)果可視化支持17引導數(shù)
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯(lián)系上傳者。文件的所有權(quán)益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網(wǎng)頁內(nèi)容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經(jīng)權(quán)益所有人同意不得將文件中的內(nèi)容挪作商業(yè)或盈利用途。
- 5. 人人文庫網(wǎng)僅提供信息存儲空間,僅對用戶上傳內(nèi)容的表現(xiàn)方式做保護處理,對用戶上傳分享的文檔內(nèi)容本身不做任何修改或編輯,并不能對任何下載內(nèi)容負責。
- 6. 下載文件中如有侵權(quán)或不適當內(nèi)容,請與我們聯(lián)系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 2025-2030餐飲街產(chǎn)業(yè)規(guī)劃及發(fā)展研究報告
- 2025-2030集成地板行業(yè)競爭格局分析及投資前景與戰(zhàn)略規(guī)劃研究報告
- 2025-2030防雷行業(yè)市場發(fā)展分析及前景趨勢與投資研究報告
- 看電視的學問(教學設計)-2023-2024學年四年級下冊綜合實踐活動安徽大學版
- 2025年婦幼保健工作計劃
- 建筑工程質(zhì)保期內(nèi)的質(zhì)量保證措施
- 初中英語教研組網(wǎng)絡教學計劃
- 信息安全研發(fā)項目管理流程實施
- 藝術(shù)行業(yè)師徒結(jié)對創(chuàng)作計劃
- 新疆新源縣喀拉布拉鎮(zhèn)八年級歷史上冊 第三單元 資產(chǎn)階級革命與中華民國的建立 第10課 中華民國的創(chuàng)建教學設計 新人教版
- 山東省威海市乳山市銀灘高級中學2024-2025學年高一下學期3月月考思想政治試題(含答案)
- 2025年開封大學單招職業(yè)適應性測試題庫附答案
- 商場改造施工方案范本
- 醫(yī)務人員手衛(wèi)生培訓
- 第6課 隋唐時期的中外文化交流 【公開課一等獎創(chuàng)新教學設計】-【教學評一體化】大單元整體教學
- 《鐵路信號基礎(第2版)》全套教學課件
- 幼教培訓課件:《幼兒園思維共享的組織與實施》
- 2025年安徽池州東至安東投資控股集團有限公司招聘筆試參考題庫附帶答案詳解
- 幼兒園清明節(jié)主題班會課件
- 2025年專升本大學計算機基礎考試大綱
- 西安經(jīng)濟技術(shù)開發(fā)區(qū)管委會招聘筆試真題2024
評論
0/150
提交評論