



版權說明:本文檔由用戶提供并上傳,收益歸屬內(nèi)容提供方,若內(nèi)容存在侵權,請進行舉報或認領
文檔簡介
1、機械工業(yè)出版社機械工業(yè)出版社自動控制原理2第第2 2章章 控制系統(tǒng)數(shù)學模型的建立控制系統(tǒng)數(shù)學模型的建立2.1 2.1 概述概述2.2 2.2 控制系統(tǒng)微分方程的建立控制系統(tǒng)微分方程的建立2.3 2.3 傳遞函數(shù)傳遞函數(shù)2.4 2.4 控制系統(tǒng)的結構圖控制系統(tǒng)的結構圖2.5 2.5 控制系統(tǒng)的信號流圖控制系統(tǒng)的信號流圖2.6 2.6 控制系統(tǒng)的傳遞函數(shù)控制系統(tǒng)的傳遞函數(shù)自動控制原理32.1 概述概述數(shù)學模型數(shù)學模型: 描述系統(tǒng)各變量之間關系的數(shù)學表達式叫做系統(tǒng)的數(shù)學模型。描述系統(tǒng)各變量之間關系的數(shù)學表達式叫做系統(tǒng)的數(shù)學模型。動態(tài)模型:動態(tài)模型:描述系統(tǒng)動態(tài)過程的方程式稱為動態(tài)模型。如微分方程、偏
2、描述系統(tǒng)動態(tài)過程的方程式稱為動態(tài)模型。如微分方程、偏微微分方程、差分方程等。分方程、差分方程等。建立系統(tǒng)數(shù)學模型時,應注意:建立系統(tǒng)數(shù)學模型時,應注意:(1)根據(jù)研究目的和精確性要求,忽略一些次要因素,使系)根據(jù)研究目的和精確性要求,忽略一些次要因素,使系統(tǒng)數(shù)學模型簡化,便于數(shù)學上的處理。統(tǒng)數(shù)學模型簡化,便于數(shù)學上的處理。(2) 根據(jù)所采用的分析方法,建立相應形式的數(shù)學模型根據(jù)所采用的分析方法,建立相應形式的數(shù)學模型(微微分方程、傳遞函數(shù)等分方程、傳遞函數(shù)等),有時還要考慮便于計算機求解。,有時還要考慮便于計算機求解。建立系統(tǒng)數(shù)學模型的途徑:建立系統(tǒng)數(shù)學模型的途徑:理論推導法(演繹法)理論推導
3、法(演繹法)通過系統(tǒng)本身機理通過系統(tǒng)本身機理(物理、化學規(guī)物理、化學規(guī)律律)分析確定模型結構和參數(shù),推導出系統(tǒng)的數(shù)學模型。分析確定模型結構和參數(shù),推導出系統(tǒng)的數(shù)學模型。實驗測試法(歸納法)實驗測試法(歸納法)根據(jù)對系統(tǒng)的觀察,由測量得到根據(jù)對系統(tǒng)的觀察,由測量得到的大量輸入、輸出數(shù)據(jù),推斷出被研究系統(tǒng)的數(shù)學模型。的大量輸入、輸出數(shù)據(jù),推斷出被研究系統(tǒng)的數(shù)學模型。自動控制原理4建立系統(tǒng)建立系統(tǒng)(或部件或部件)微分方程式的一般步驟:微分方程式的一般步驟:(1)在條件許可下,適當簡化,忽略一些次要因素;在條件許可下,適當簡化,忽略一些次要因素; (2)根據(jù)物理或化學定律,列出部件的原始方程式;根據(jù)物
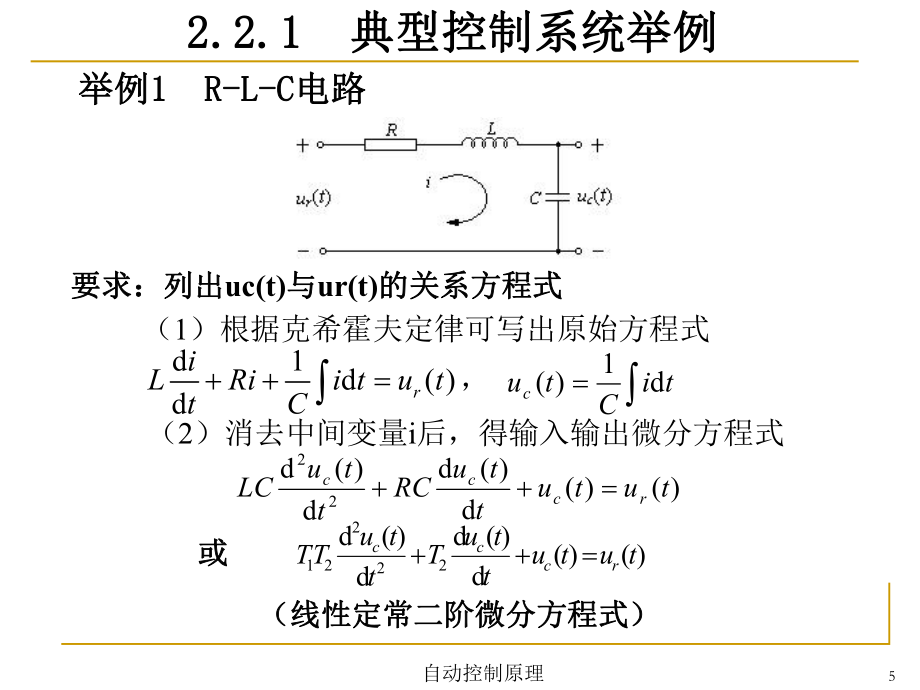
4、理或化學定律,列出部件的原始方程式;(3)列出原始方程式中中間變量與其它變量的關系式;列出原始方程式中中間變量與其它變量的關系式; (4)從所有方程式中消去中間變量,僅保留系統(tǒng)的輸從所有方程式中消去中間變量,僅保留系統(tǒng)的輸入變量和入變量和 輸出變量;輸出變量; (5)最后,將微分方程表示成標準形式,即輸出變量最后,將微分方程表示成標準形式,即輸出變量在左,輸在左,輸 入變量在右,導數(shù)階次從高到低排列。入變量在右,導數(shù)階次從高到低排列。2.2 2.2 控制系統(tǒng)微分方程的建立控制系統(tǒng)微分方程的建立自動控制原理5舉例舉例1 R-L-C1 R-L-C電路電路 要求:列出要求:列出uc(t)與與ur(t
5、)的關系方程式的關系方程式 (1)根據(jù)克希霍夫定律可寫出原始方程式d1d( )driLRii tu ttC,tiCtucd1)((2)消去中間變量i后,得輸入輸出微分方程式 )()(d)(dd)(d22tututtuRCttuLCrccc)()(d)(dd)(d22221tututtuTttuTTrccc或或(線性定常二階微分方程式)(線性定常二階微分方程式) 2.2.1 2.2.1 典型控制系統(tǒng)舉例典型控制系統(tǒng)舉例自動控制原理6舉例舉例2 2 彈簧彈簧質量質量阻尼器系統(tǒng)阻尼器系統(tǒng) (1)列出原始方程式。根據(jù)牛頓第二定律,有要求:寫出系統(tǒng)在外力要求:寫出系統(tǒng)在外力f (t)作用下的運動方程式作
6、用下的運動方程式2221dd)()()(tyMtftftf(2)消去中間變量 ttyBtfd)(d)(1B 阻尼系數(shù) f2 (t) = Ky(t) K 彈性系數(shù) 22d( )d ( )1( )( )ddMy tBy ty tf tKtKtK代入上式并整理(線性定常二階微分方程式)(線性定常二階微分方程式) 自動控制原理7舉例舉例3 3 電樞控制的直流電動機電樞控制的直流電動機 電樞電壓控制的直流電動機線路原理圖和結構圖電樞電壓控制的直流電動機線路原理圖和結構圖(1)列寫原始方程式。電樞回路方程式: 輸入電樞電壓ua 輸出軸角位移q 或角速度w 擾動負載轉矩MLaeaaauKiRtiLdd根據(jù)剛
7、體旋轉定律,寫出運動方程式:dLMMtJdd(2)Md和ia是中間變量。由于電動機轉矩與電樞電流和氣 隙磁通的乘積成正比,又因磁通恒定,有 ,amdiKM聯(lián)立求解,整理后得 tMKKLMKKRuKtKKJRtKKJLLmeaLmeaaemeameadd1dddd22自動控制原理8(續(xù)上頁)(續(xù)上頁)若輸出為電動機軸的轉角q ,則有 tMJTTMJTuKttTtTTLmaLmaemmadd1dddddd2233(三階線性定常微分方程)(三階線性定常微分方程) meamKKJRT機電時間常數(shù)(秒)aaaRLT 電動機電樞回路時間常數(shù)(秒) , 一般比Tm小tMKKLMKKRuKtKKJRtKKJL
8、LmeaLmeaaemeameadd1dddd22tMJTTMJTuKtTtTTLmaLmaemmadd1dddd22或或自動控制原理9舉例舉例4 4 磁場控制的直流電動機磁場控制的直流電動機 設電樞電流Ia=常數(shù),氣隙磁通F(t)= Kf if (t),激磁回路電感Lf為常值。dddJBMt(1)激磁回路方程式:tiRufffddffiffffuBRKtBJRLtBJRLdd)(dd22fdmfmfuKtTTtTTdd)(dd22或(2)轉矩平衡方程式: (3)消去中間變量j, Md : ,dmmffi fMKK K iK iffL i自動控制原理10舉例舉例5 5 電動機轉速控制系統(tǒng)電動機
9、轉速控制系統(tǒng) 電動機轉速控制系統(tǒng)原理圖及結構圖 w為輸出,ur為參考輸入,ML為擾動輸入(1)列各部件方程式:22ddd1dddammLammaLeT TTMT TTuMttKJtJ,aattrtuK euKeuu(2)消去中間變量,得:22ddd(1)dddaammLammrLeKT TTMT TTKuMttKJtJ,ateK KKK自動控制原理11舉例舉例6 6 流體過程流體過程 輸入量Qi(供水量) 輸出量H (液面高度)(一階非線性微分方程式)(一階非線性微分方程式) (1)設流體是不可壓縮的。根據(jù)物質守恒定律,可得0d()diS HQQt HQ0iQSHStH1dd(2)求出中間變量
10、Qo與其他變量關系(3)消去中間變量Qo ,就得輸入輸出關系式自動控制原理12 直流電動機轉速自動鎮(zhèn)定系統(tǒng)圖 設各處信號(變量)均在工作點附近不大范圍內(nèi)變動。列原始方程(1) 激磁回路 (j與if是非線性關系) (2) 電樞回路 (非線性方程) aeaaaauKiRtiLdd(3) 電動機 (非線性方程) ddLDDMaJMMMKit, 2.2.2 非線性微分方程的線性化非線性微分方程的線性化fffutiRdd(4) 放大器 (5) 測速發(fā)電機 ttuK(6) 比較器rteuufauK e自動控制原理1310202200)()dd(!1)()dd(! 21)dd(nnfnfnffffRiini
11、iiiffii00)dd(忽略二次以上高次項,得: , , ffLi)dd(0tanffiL0 j與if是之間的非線性關系 設j的工作點為j0 ,if 的工作點為if0 ,在工作點的鄰域內(nèi),j對if的各階導數(shù)存在,它可展開成泰勒級數(shù): 2.2.2 非線性微分方程的線性化(續(xù))非線性微分方程的線性化(續(xù))寫成偏量線性化方程式:ffLi所以激磁回路偏量線性化方程為: fffffuRitiT1dd自動控制原理14 同理,設各處信號(變量)均在工作點附近不大范圍內(nèi)變動,它們的偏量方程式可求之如下: 電樞回路 00d0daaaaeeiLRiKKt電動機 ,00()dLMaaJMKiitdffiC 2.2
12、.2非線性微分方程的線性化(續(xù))非線性微分方程的線性化(續(xù))放大器 eKuaf測速發(fā)電機 ttKu比較器 e=ur-ut ,因為ur =0 ,故tue 消去中間變量,得擾動輸入ML下的線性化方程:323222ddd()()(1)ddddd() ddMafMaffMtamaMLLafafLT T TTTTTTK K K TKtttTMMT TTTMJtt ,00f aamfaC iRKRK自動控制原理15 2.3 傳遞函數(shù)傳遞函數(shù) 2.3.1 2.3.1 傳遞函數(shù)的概念傳遞函數(shù)的概念 RC RC電路如下:根據(jù)克希霍夫定律,電路如下:根據(jù)克希霍夫定律, 可列寫微分可列寫微分方程方程)()()(tu
13、tutRircttiCtucd)(1)(消去中間變量i(t),得)()(d)(dtututtuRCrcc)()()()(sUsURCusRCsUrccc0 對上式進行拉氏變換 求出Uc(s)的表達式)(1)(11)(0crcuRCsRCsURCssU若uc(0)=0 )(11)(sURCssUrc或1111)()()(TsRCssUsUsGrc式中 T=RC 自動控制原理16若線性定常系統(tǒng)由下述n階微分方程描述令C(s)=Lc(t),R(s)=Lr(t),在初始條件為零時,進行拉氏變換,可得到s的代數(shù)方程 )()()()()(01110111sDsMasasasabsbsbsbsRsCsGnn
14、nnmmmm111101111ddddddddddddnnmmnnmmnnmmcccrrraaa cbbbb rtttttt 1111011nnmmnnmmsa sasaC sb sbsbsbR s傳遞函數(shù)定義傳遞函數(shù)定義: 線性線性(或線性化或線性化)定常系統(tǒng)在零初始條件下,輸出量定常系統(tǒng)在零初始條件下,輸出量的拉氏變換與輸入量的拉氏變換之比稱為傳遞函數(shù)。的拉氏變換與輸入量的拉氏變換之比稱為傳遞函數(shù)。 線性定常系統(tǒng)的傳遞函數(shù)為 2.3.1 2.3.1 傳遞函數(shù)的概念傳遞函數(shù)的概念( (續(xù)續(xù)) )自動控制原理172.3.1 2.3.1 傳遞函數(shù)的性質傳遞函數(shù)的性質 (1)傳遞函數(shù)是復變量s的有
15、理真分式函數(shù),分子的階數(shù)m一 般低于或等于分母的階數(shù)n, 即mn ,且所有系數(shù)均為 實數(shù)。(2)傳遞函數(shù)只取決于系統(tǒng)和元件的結構和參數(shù),與外作用 及初始條件無關。(3)一定的傳遞函數(shù)有一定的零、極點分布圖與之對應,因 此傳遞函數(shù)的零、極點分布圖也表征了系統(tǒng)的動態(tài)性能。 (5) 傳遞函數(shù)只能表示輸入與輸出的函數(shù)關系,至于系統(tǒng)中 的中間變量無法反映出來。1011111( )( )( )( )( )mmmmnnnnb sbsbsbC sM sG sR ssa sasaD s(4) 若下式中s = 0,則(0)mnbGa 稱為傳遞系數(shù)(或靜態(tài)放大系數(shù))。 (6)一個傳遞函數(shù)只能表示一個輸入對一個輸出的
16、函數(shù)關系。自動控制原理182.3.1 2.3.1 典型環(huán)節(jié)及其傳遞函數(shù)典型環(huán)節(jié)及其傳遞函數(shù)1( )1G sTs(1)比例環(huán)節(jié) G(s)= K (3 3)積分環(huán)節(jié))積分環(huán)節(jié) TssG1)(T 慣性環(huán)節(jié)時間常數(shù) 當積分環(huán)節(jié)的輸入信號為單位階躍當積分環(huán)節(jié)的輸入信號為單位階躍函數(shù)時,則輸出為函數(shù)時,則輸出為t/Tt/T,它隨著時間直線,它隨著時間直線增長。增長。 (2)慣性環(huán)節(jié)自動控制原理19(4)微分環(huán)節(jié) G(s) = T s (理想微分環(huán)節(jié) )1)(21sTsTsG(實際微分環(huán)節(jié)) (5) 比例微分環(huán)節(jié) wn=1/T為無阻尼自然振蕩頻率 z為阻尼比,0z1sesG)()000( )( )d()d(
17、 )d( )ststssC sc t etr tetreeR s )1 ()(TsKsGc(6) 振蕩環(huán)節(jié)222( )2nnnG sss (7)延滯環(huán)節(jié)2.3.1 2.3.1 典型環(huán)節(jié)及其傳遞函數(shù)典型環(huán)節(jié)及其傳遞函數(shù)( (續(xù)續(xù)) )自動控制原理202.4 2.4 控制系統(tǒng)的結構圖控制系統(tǒng)的結構圖 2.4.1 2.4.1 結構圖的概念結構圖的概念RiuucrtiCucd1拉氏變換 )()()(sRIsUsUcr)(1)(sICssUc)()()(1sIsUsURcrRC網(wǎng)絡的微分方程式為自動控制原理21控制系統(tǒng)結構圖的建立步驟控制系統(tǒng)結構圖的建立步驟(1)建立控制系統(tǒng)各元部件的微分方程。在建立微
18、 分方程時,應分清輸入量、輸出量,同時應考 慮相鄰元件之間是否有負載效應。(2)對各元件或部件的微分方程進行拉氏變換,并 作出各元件的結構圖。(3)按照系統(tǒng)中各變量的傳遞順序,依次將各部件 結構圖連接起來,置系統(tǒng)輸入變量于左端,輸 出變量于右端。 自動控制原理22例例1 1 繪制無源電路的結構圖。繪制無源電路的結構圖。urur為網(wǎng)絡輸入,為網(wǎng)絡輸入,ucuc為網(wǎng)絡輸出。為網(wǎng)絡輸出。 因為(uruc) 為R1與C并聯(lián)支路的端電壓,i1+i2=i,R2i= uc ,所以2.4.2 2.4.2 控制系統(tǒng)結構圖的建立控制系統(tǒng)結構圖的建立 自動控制原理23例例2 2 兩級兩級RCRC網(wǎng)絡的結構圖網(wǎng)絡的結
19、構圖 (2)連接相關信號線,得到最終結構圖(1)根據(jù)原始方程建立局部結構圖 由于后一級RC電路是前一級的負載,所以在結構圖中它們相互影響。自動控制原理24 為了消除負載效應,可以在兩級RC電路之間插入隔離放大器。帶有隔離放大器的兩級帶有隔離放大器的兩級RC網(wǎng)絡網(wǎng)絡 自動控制原理25例例3 3 位置隨動控制系統(tǒng)位置隨動控制系統(tǒng) 系統(tǒng)各部分微分方程經(jīng)拉普拉斯變換后的關系式及相應的局部結構圖如下 ssrcUK()aasUK UabaaaUEIL sRdmaMK IbemEK s自動控制原理26dLmMMsBs2J1cmi 將每個子方程的結構圖按照相互關系,正確地連接起來,得到下圖 例例3 3 位置隨
20、動控制系統(tǒng)(續(xù))位置隨動控制系統(tǒng)(續(xù))自動控制原理272.4.3 2.4.3 結構圖的等效變換結構圖的等效變換 (1)(1)結構圖的基本組成形式結構圖的基本組成形式 1 1)串聯(lián)連接)串聯(lián)連接 2)并聯(lián)連接 )()()()()()(122sRsGsGsUsGsC)()()()(21sGsGsRsC)()()()()()(2211sRsGsCsRsGsC)()()( )()()()()(2121sRsGsGsRsGsRsGsC)()()()(21sGsGsRsC自動控制原理283)反饋連接 按照信號傳遞的關系可寫出: )()()()()()()()()(sBsRsEsCsHsBsEsGsC消去E
21、(s)和B(s),得 )()()()()()()()()()(sCsHsGsRsGsCsHsRsGsC)()()()()(1 )()()()(sRsGsCsHsGsCsHsGsC因此 此處的加號對應于負反饋;減號對應于正反饋。( )( )( )( )1( )( )C sG sW sR sG s H s2.4.3 2.4.3 結構圖的等效變換結構圖的等效變換( (續(xù)續(xù)) ) 自動控制原理29(2)(2)綜合點與引出點的移動綜合點與引出點的移動 1) 1)綜合點的前后移動綜合點的前后移動a. 綜合點前移的 等效變換b. 綜合點后移的 等效變換2)相鄰綜合點之 間的移動 2.4.3 2.4.3 結構
22、圖的等效變換結構圖的等效變換( (續(xù)續(xù)) ) 自動控制原理303)引出點的前后移動 b. 引出點前移的等效變換 4)相鄰引出點之間的移動a. 引出點后移的等效變換 2.4.3 2.4.3 結構圖的等效變換結構圖的等效變換( (續(xù)續(xù)) ) 自動控制原理31(3)(3)結構圖變換舉例結構圖變換舉例 0LM 令 例1 位置隨動系統(tǒng)2( )( )/( )/(/)/crsamameasamaw sssK K KR iJsBK KR sK K KR i2.4.3 2.4.3 結構圖的等效變換結構圖的等效變換( (續(xù)續(xù)) ) 自動控制原理32 例 2 簡 化 結 構 圖 , 并 求 系 統(tǒng) 傳 遞 函 數(shù)C
23、(s)/R(s) 。1432134323243211)()(HGGGGHGGHGGGGGGsRsC2.4.3 2.4.3 結構圖的等效變換結構圖的等效變換( (續(xù)續(xù)) ) 自動控制原理33例例3 3 化簡兩級化簡兩級RCRC網(wǎng)絡結構圖,并求出傳遞函數(shù)網(wǎng)絡結構圖,并求出傳遞函數(shù)Uc(s)/Ur(s)Uc(s)/Ur(s)。 2.4.3 2.4.3 結構圖的等效變換結構圖的等效變換( (續(xù)續(xù)) ) 自動控制原理34簡化結構圖求總傳遞函數(shù)的一般步驟簡化結構圖求總傳遞函數(shù)的一般步驟(1)確定輸入量與輸出量,如果作用在系統(tǒng)上的輸入量有多個(分別作用在系統(tǒng)的不同部位),則必須分別對每個輸入量逐個進行結構變
24、換,求得各自的傳遞函數(shù)。對于有多個輸出量的情況,也應分別處理。(2)若結構圖中有交叉關系,應運用等效變換法則,首先將交叉消除,化為無交叉的單回路結構。(3)對于回路可由里向外變換,直至變換為一個等效的方框,即得到所求的傳遞函數(shù)。自動控制原理352.5 2.5 控制系統(tǒng)的信號流圖控制系統(tǒng)的信號流圖2.5.1 2.5.1 信號流圖定義:由節(jié)點和支路組成的信號傳遞網(wǎng)絡信號流圖定義:由節(jié)點和支路組成的信號傳遞網(wǎng)絡信號流圖的常用術語:信號流圖的常用術語:節(jié)點:在圖中用小圓圈表示,表示變量(或信號)節(jié)點:在圖中用小圓圈表示,表示變量(或信號)支路:是連接相鄰兩個節(jié)點之間的定向線段支路:是連接相鄰兩個節(jié)點之
25、間的定向線段 ,它有一定的增,它有一定的增 益益( (即傳遞函數(shù)即傳遞函數(shù)) ),稱為支路增益,稱為支路增益輸入節(jié)點:只有輸出支路沒有輸入支路的節(jié)點稱為輸入節(jié)點輸入節(jié)點:只有輸出支路沒有輸入支路的節(jié)點稱為輸入節(jié)點 輸出節(jié)點:只有輸入支路沒有輸出支路的節(jié)點稱為輸出節(jié)點輸出節(jié)點:只有輸入支路沒有輸出支路的節(jié)點稱為輸出節(jié)點 混合節(jié)點:既有輸入支路又有輸出支路的節(jié)點稱為混合節(jié)點混合節(jié)點:既有輸入支路又有輸出支路的節(jié)點稱為混合節(jié)點通路:從某一節(jié)點開始沿支路箭頭方向經(jīng)過各相連支路到另通路:從某一節(jié)點開始沿支路箭頭方向經(jīng)過各相連支路到另 一節(jié)點所構成的路徑稱為通路一節(jié)點所構成的路徑稱為通路前向通路:是指從輸
26、入節(jié)點開始并終止于輸出節(jié)點且與其它前向通路:是指從輸入節(jié)點開始并終止于輸出節(jié)點且與其它 節(jié)點相交不多于一次的通路節(jié)點相交不多于一次的通路回路:如果通路的終點就是通路的起點,并且與任何其它節(jié)回路:如果通路的終點就是通路的起點,并且與任何其它節(jié) 點相交不多于一次的通路稱為回路點相交不多于一次的通路稱為回路不接觸回路:如果一信號流圖有多個回路,各回路之間沒有不接觸回路:如果一信號流圖有多個回路,各回路之間沒有 任何公共節(jié)點,則稱為不接觸回路任何公共節(jié)點,則稱為不接觸回路自動控制原理362.5.2 2.5.2 由系統(tǒng)結構圖繪制信號流圖由系統(tǒng)結構圖繪制信號流圖例例 試將下圖所示系統(tǒng)的結構圖轉化為信號流圖
27、。試將下圖所示系統(tǒng)的結構圖轉化為信號流圖。自動控制原理372.5.3 2.5.3 用梅遜公式求傳遞函數(shù)用梅遜公式求傳遞函數(shù)梅遜公式梅遜公式nkkkPP1式中,P 信號流圖的總增益;稱為特征式,kjijiiLLLLLL1 Li所有回路的回路增益之和; LiLj所有兩兩互不接觸回路的回路增益乘積之和; LiLjLk所有三個互不接觸回路的回路增益乘積之和; n從輸入節(jié)點到輸出節(jié)點所有前向通路的條數(shù); Pk從輸入節(jié)點到輸出節(jié)點第k條前向通路的增益; Dk在中,將與第k條前向通路相接觸的回路增益除去后 所余下的部分,稱為余子式。自動控制原理38應用舉例一應用舉例一412345612324533441ii
28、LGG G G G G HG G HG G HG G H 32543235423232 )(HHGGGGHGGHGGLLLLji12345612324533442345231 1iijLL LGG G G G G HG G HG G HG G HG G G G H H 3254324433542321654321654321111HHGGGGHGGHGGHGGHGGGGGGGGGGGGpP112345611PGG G G G G ,自動控制原理39141227236452423452LG HLG G HLG G G HLG G G G H ,4個回路:1個兩兩互不接觸回路:3條前向通路和相應余
29、子式:1123451216452312731111PGG GG GPGG G GPGG GL ,;,總增益:25432254627214147215461543213322111)1 ()(1)()(HGGGGHGGGHGGHGHGGGGGGGGGGGGGPPPPsRsC應用舉例二應用舉例二1241272L LG H G G H自動控制原理40應用舉例三應用舉例三 要求:繪制三級要求:繪制三級RC網(wǎng)絡結構圖,并求網(wǎng)絡結構圖,并求其傳遞函數(shù)其傳遞函數(shù)Uc/Ur 。(1)繪制結構圖。用復阻抗與電壓、電流關系,可以直接繪出網(wǎng)絡的結構圖: (2)求傳遞函數(shù)。該結構圖有5個反饋回路,回路傳遞函數(shù)均相同,
30、即RCsLLL1521RCsLi5有6組兩兩互不接觸回路,為-、-、-、-、-及-: 222sCRLLji6有1組三個互不接觸的回路,即-: 3331sCRLLLkji自動控制原理41特征式為 333222111sCRsCRRCs LLLLLLkjijii65前向通路只有一條: 33311sCRP 前向通路與各反饋回路均有接觸,余子式: 1 = 1則由梅遜公式可求得總傳遞函數(shù):1111122233333322233311RCssCRsCR sCRsCRRCssCRPUUrc6565應用舉例三(續(xù))應用舉例三(續(xù))自動控制原理422.6 2.6 控制系統(tǒng)的傳遞函數(shù)控制系統(tǒng)的傳遞函數(shù) 閉環(huán)控制系統(tǒng)的典型結構圖 r(t)輸入信號n(t)擾動信號(1)r(t)作用下系統(tǒng)的閉環(huán)傳遞函數(shù) 1212( )( )( )( )( )1( )( )( )G s G sC sW sR sG s G s H s輸出函數(shù)的拉氏變換1212( )( )( )( ) ( )( )1(
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯(lián)系上傳者。文件的所有權益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網(wǎng)頁內(nèi)容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經(jīng)權益所有人同意不得將文件中的內(nèi)容挪作商業(yè)或盈利用途。
- 5. 人人文庫網(wǎng)僅提供信息存儲空間,僅對用戶上傳內(nèi)容的表現(xiàn)方式做保護處理,對用戶上傳分享的文檔內(nèi)容本身不做任何修改或編輯,并不能對任何下載內(nèi)容負責。
- 6. 下載文件中如有侵權或不適當內(nèi)容,請與我們聯(lián)系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 職教德育考試題及答案
- 2025至2030中國益生菌添加劑行業(yè)前景調(diào)研及投融資趨勢研究報告
- 計算機二級考試技巧與試題及答案
- 2025至2030中國有火香薰市場營銷渠道與發(fā)展前景規(guī)劃研究報告
- 藥劑考試能力提升方案試題及答案
- 2025至2030中國商用超聲波清洗機行業(yè)深度調(diào)研及未來銷售渠道趨勢報告
- 2025至2030中國光提取層材料市場營銷策略探討與競爭戰(zhàn)略規(guī)劃報告
- 2025至2030中國七彩紗市場供需狀況與競爭策略研究報告
- 2025至2030中國DBE行業(yè)發(fā)展前景風險及未來投資契機研究報告
- 2025-2030黑茶產(chǎn)業(yè)規(guī)劃行業(yè)深度調(diào)研及投資前景預測研究報告
- 圓型檢查井自動計算表
- 智能分類垃圾桶識別設計與實現(xiàn)
- 15ZJ001 建筑構造用料做法
- 全國各地城市名稱EXCEL格式
- 魔戒(指環(huán)王)詳細介紹展示PPT(多圖)
- 六年級數(shù)學下冊第二次月考試卷(各版本)
- 機械加工廠設備設施風險分級管控清單
- 中國反恐形勢的現(xiàn)狀和對策分析研究
- 籃球協(xié)會章程和規(guī)章制度
- 國開電大-工程數(shù)學(本)-工程數(shù)學第4次作業(yè)-形考答案
- 2023年司法考試真題及答案
評論
0/150
提交評論