

版權說明:本文檔由用戶提供并上傳,收益歸屬內容提供方,若內容存在侵權,請進行舉報或認領
文檔簡介
1、第十二部分 傳感器技術0 預備知識傳感器在機電一體化系統乃至整個現代科學技術領域占有極其重要的地位,當今信息 時代,如果沒有傳感器,現代科學技術將無法發展。為了適應這一時代發展的需要,全國 各大中專院校及各類職業技術學校都相繼將傳感器及實驗教案納入教案任務,作為物理、 電子、測控以及自動化類專業的一門必修課。傳感器是機電一體化中各種設備和裝置的“感覺器官”,是檢測系統的第一個環節。 它以一定的精度把被測量 各種各樣形態各異的信息量)轉換成與之有確定關系的、便于應 用的某種量值的測量裝置。顧名思義,傳感器的功能是一感二傳,即感受被測信息,并傳 送出去。根據傳感器的功能特點,一般由三部分組成:敏感
2、元件、轉換元件、測量電路。敏感元件:能夠靈敏地感受被測量并作出響應的元件。如金屬或半導體應變片,能感 受壓力的大小而引起形變,形變程度就是對壓力大小的響應。鉑電阻能感受溫度的升降而 改變其阻值,阻值的變化就是對溫度升降的響應,所以鉑電阻就是一種溫度敏感元件,而 金屬或半導體應變片,就是一種壓力敏感元件。轉換元件:將敏感元件感受的被測量轉換成電路參數的元件。如果敏感元件本身就能 直接將被測量變成電路參數,那么,該敏感元件就是具有了敏感和轉換兩個功能。如熱敏 電阻,它不僅能直接感受溫度的變化,而且能將溫度變化轉換成電阻的變化,也就是將非 電路參數 溫度)直接變成了電路參數 電阻)。測量電路:將轉換
3、元件轉換的電學量進行測量的電路。傳感器的種類較多,根據被測物理量可分為:速度傳感器、位移傳感器、加速度傳感器、 溫度傳感器、壓力傳感器、光纖傳感器等。根據工作原理分為:應變式、電壓式、電容 式、渦流式、差動變壓器式等。根據能量的傳遞方式分為:有源的和無源的傳感器。了解和掌握一定的傳感器技術對每個科技工作者來說是十分必要的。本部分內容通過 兩個實驗的實際應用,使學生對傳感器有一個初步了解實驗僅通過金屬箔式電阻應變片的一種實際應用而使學生對傳感器有一個初步了解。實驗一用金屬箔式電阻應變片作交流全橋的應用振動測量實驗一、實驗目的1. 了解金屬箔式電阻應變片的結構和工作原理;2. 熟悉非平衡電橋的輸出
4、靈敏度特性;3. 掌握利用交流電橋測量動態應變參數的原理與方法。二、實驗內容1金屬箔式電阻應變片的結構和工作原理應變式電阻傳感器的核心元件是電阻應變計,它能將機械物件上的應變的變化轉換成 電阻值的變化。通過對電阻值變化量的測量即可得知機械構件的應變情況,從而可以求出 引起該變化的物理量的大小。其構造簡圖如圖12-1 所示。排成網狀的高阻金屬絲,柵狀金屬箔或半導體片構成的敏感柵,用合適的粘合劑貼在絕緣的基片 2 上,敏感柵上貼有保護372APRxpR片3,柵絲較細,一般為 0.0150.06mm或厚度為0.0030.010mm的金屬箔)。其兩端焊有較粗0.10.2mm )的低阻銅絲4作為與電路相
5、連的引線。將S=n .d2/4代入上式,并將微分寫成增量式。R _ J L d圖12-1電阻絲應變片結構示意圖1、電阻絲 2 、基片3、覆蓋層4、引出線使用時,選擇合適的粘合劑將應變計貼在被測試件表面。試件形變引起敏感柵變形, 于是其阻值發生變化,通過測量電路可將敏感柵的阻值變化轉換為電壓或電流的變化。如 果將二片相同的應變計粘貼在平行梁上同一位置的正、反兩面,則該平行梁形變所引起的 二片應變計的電阻變化剛好相反,即: R上=- R下對于一根長為L,截面積為S直徑為d),電阻率為p的金屬絲,其電阻 R為兩邊取對數,再微分得RS由材料力學知,在彈性范圍內金屬絲沿長度方向伸長時,橫向尺寸縮小,反之
6、亦然。即縱向應變£ x與徑向應變£ r存在下列關系:£ r=U . £ x(卩為材料的泊松比 。設也LAdxrLd=(12);x 由此可見,電阻絲的電阻變化由兩部分組成:第一部分是材料的幾何形變引起,即應變效應;第二部分是電阻率的變化引起的,即壓阻效應。對金屬材料而言,應變效應是主要的,其靈敏度 K°=l+2卩 1.52.0。對于半導體材料,壓阻效應是主要的,在制造工藝雖然比金屬復雜,但靈敏度比金屬約大50100倍,甚至可以不用放大器而直接由電壓表或示波器顯示測量結果。對于金屬材料,上式可進一步寫成dRdL dSR _ J L _ S式中,Ks
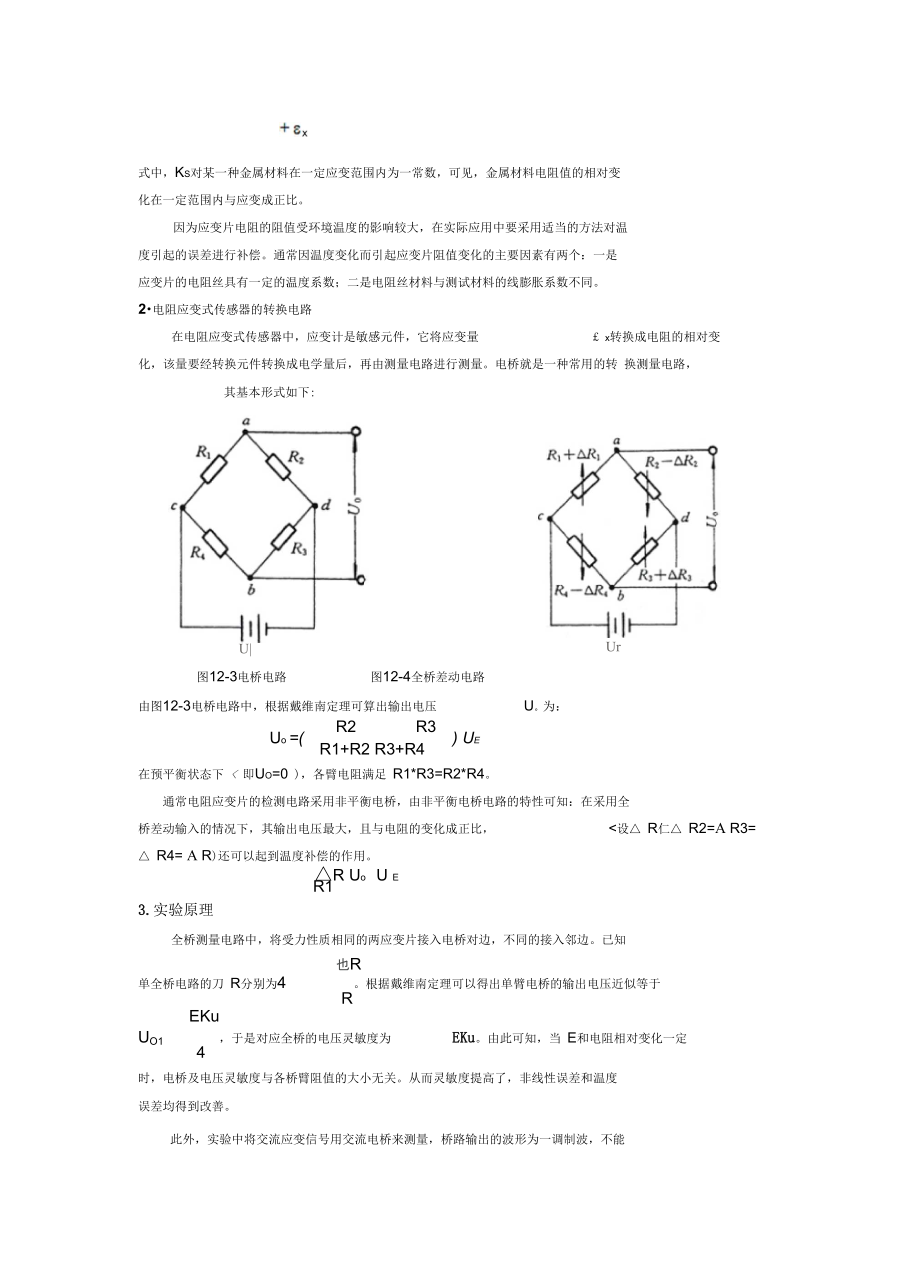
7、對某一種金屬材料在一定應變范圍內為一常數,可見,金屬材料電阻值的相對變 化在一定范圍內與應變成正比。因為應變片電阻的阻值受環境溫度的影響較大,在實際應用中要采用適當的方法對溫 度引起的誤差進行補償。通常因溫度變化而引起應變片阻值變化的主要因素有兩個:一是 應變片的電阻絲具有一定的溫度系數;二是電阻絲材料與測試材料的線膨脹系數不同。2電阻應變式傳感器的轉換電路在電阻應變式傳感器中,應變計是敏感元件,它將應變量£ x轉換成電阻的相對變化,該量要經轉換元件轉換成電學量后,再由測量電路進行測量。電橋就是一種常用的轉 換測量電路,其基本形式如下:U|:Ur圖12-3電橋電路圖12-4全橋差動電
8、路由圖12-3電橋電路中,根據戴維南定理可算出輸出電壓U。為:R2R3Uo =() UeR1+R2 R3+R4在預平衡狀態下 < 即Uo=0 ),各臂電阻滿足 R1*R3=R2*R4。通常電阻應變片的檢測電路采用非平衡電橋,由非平衡電橋電路的特性可知:在采用全 橋差動輸入的情況下,其輸出電壓最大,且與電阻的變化成正比,<設 R仁 R2=A R3= R4= A R)還可以起到溫度補償的作用。R UoU ER13.實驗原理全橋測量電路中,將受力性質相同的兩應變片接入電橋對邊,不同的接入鄰邊。已知也R單全橋電路的刀 R分別為4。根據戴維南定理可以得出單臂電橋的輸出電壓近似等于REKuUO
9、1,于是對應全橋的電壓靈敏度為EKu。由此可知,當 E和電阻相對變化一定4時,電橋及電壓靈敏度與各橋臂阻值的大小無關。從而靈敏度提高了,非線性誤差和溫度誤差均得到改善。此外,實驗中將交流應變信號用交流電橋來測量,橋路輸出的波形為一調制波,不能 直接顯示其應變值,只有通過移相、相敏檢波和濾波電路后才能得到變化的應變信號,此 信號可以從示波器或用交流電壓表讀得。三、實驗儀器該實驗是在ZY13Sens12SB型傳感器技術實驗臺上進行的。1. ZY13Sens12SB型傳感器實驗臺ZY13Se ns12SB型傳感器實驗臺主要由音頻振蕩器、低頻振蕩器、應變式傳感器實驗模板、相敏檢波器模板、振動源、三源板
10、上等組成。實驗臺的結構及面板示意圖如圖12-5所示。圖12-5 ZY13Sens12SB型傳感器技術實驗臺2. 應變式傳感器結構示意圖應變式傳感器主要由應變片、彈性體、模板、托盤、固定墊等組成,其結構示意圖為圖 12-6。應變片托盤接音叛振蕩器LvSKIIz接地O O加熱器R2 R3<P OII H紅接主悴箱 業源輸出黃W_6rII h 1-E 只吶 +e社Rt:Rll肚四、實驗步驟1、模塊上的傳感器不用,改為三源板板上振動梁的應變片,即臺面上的應變輸出。2、將臺面三源板上的應變插座用連接線插入應變傳感器實驗模板上。因振動梁上的四 片應變片已組成全橋,引出線為四芯線,因此可直接接入實驗模
11、板面上已聯成電橋的四個插孔上。接線時應注意連接線上每個插頭的意義,對角線的阻值為350 Q,若二組對角線阻值均為350 Q則接法正確 萬用表測量)。3、 根據圖7 1,接好交流電橋調平衡電路及系統,R8 RWW、C RW2為交流電橋調平衡網絡。檢查接線無誤后,合上主控臺電源開關,將音頻振蕩器的頻率調節到1KHz左右,幅度調節到10Vp-p , 頻率可用數顯表Fin監測,幅度用示波器監測)4、將低頻振蕩器輸出接入三源板振動單元中的低頻輸入插孔,調低頻輸出幅度和頻率 使振動臺 圓盤)明顯感到振動。5、固定低頻振蕩器幅度旋鈕位置不變,低頻輸出端接入數顯單元的Fin,把數顯表的切換開關打到頻率檔監測低
12、頻頻率,調低頻頻率,用示波器讀出頻率改變時低通濾波器輸 出Vo的電壓峰一峰值,填入下表:f<Hz)Vo(P-P>從實驗數據得振動梁的自振頻率為HZ。五、實驗注意事項不用應變模塊上的傳感器,用專用的連接線將三源板上的應變輸出和模塊上的插孔連 接起來。應變線的接線可參考圖12-6。六、實驗思考題1. 分析移相器的工作原理。2傳感器不受外力作用時,理論上電橋應處于初始平衡狀態,但實際測量時,電橋總是有 點不平衡,為什么?3. 實驗中采用移相、相敏檢波和濾波電路有何作用?參考文獻1 王化祥張淑英編著傳感器原理及應用天津大學出版社 1999.2第2版19-35.2 余成波.胡新宇編著.傳感器
13、與自動檢測技術.高等教育出版社 2004.2第1版200-210實驗二光纖傳感器的位移特性實驗光纖傳感器(FOS Fiber Optical Sensor>是20世紀70年代中期發展起來的一種基于光導纖維的新型傳感器。它是光纖和光通信技術迅速發展的產物, 它與以電為基礎的傳感器有本質區別,光纖傳感器用光作為敏感信息的載體,用 光纖作為傳遞敏感信息的媒質,可測量位移、速度、加速度、液位、應變、壓 力、流量、振動、溫度、電流、電壓、磁場等物理量。本實驗通過測量光纖傳 感器的位移特性來,對熟悉和掌握光纖傳感器十分必要。一、實驗目的1. 理解光纖傳感器的工作原理;2. 理解傳光型光纖傳感器的工作
14、原理;3. 了解光纖位移傳感器性能。二、實驗儀器光纖傳感器、光纖傳感器實驗模板、數顯單元、測微頭、直流源、反射面 < 用電渦流傳感器的鐵測片做反射面)等組成,如圖所示。光纖位移反射面一!一模板測量架 一測微頭傳感器圖1實驗儀器圖三、實驗原理傳光型光纖傳感器是由光檢測元件與光纖傳輸回路及測量電路所組成的測量 系統。在傳光型光纖傳感器中光纖僅作為光的傳播媒質,所以又稱為結構型或 非功能型光纖傳感器。光纖僅僅起傳輸光信號的光學通路的作用,被測參數均 在光纖之外,由外置敏感元件調制到光信號中去。滋光器分光鏡光纖it接收昜傳光型傳感器又叫結構型光纖傳感器,或者非功能型光纖傳感器,在這類 傳感器中,
15、光纖的作用只是傳輸光,需要加上其他敏感元件,才能構成完整的 傳感器,為了得到較大受光量和傳輸的光功率,傳光型光纖傳感器通常采用豎 直孔徑和大的階躍型多模光纖,它的結構比較簡單,并且能夠充分利用光電元 件和光纖本身的特點,應用比較廣,它的缺點是靈敏度比傳感型光纖傳感器要 低,測量精度也較差。案例:光纖位移傳感器上圖所示為反射式光纖位移傳感器,這種類型的傳感器將發射光纖和接收 光纖綁在一起,從發射光纖發射出的光經被測物體表面直接或者間接反射后, 再經接收光纖照射到光敏元件上,光敏元件所接收到的光亮會隨被測物體表面 與傳感器端面的相對位移的變化而變化。那么相對光強和相對位移之間的關系,接收到的:從圖
16、上我們可以看與光纖端面d的增 由最大隨著d的增大開始減小,圖中曲纟如下圖所示。,當' d很小的時候,接收到的光亮也很小,隨著物體 隨著增加,至V達某一值后,接收到的光亮 A段,也就是光強由0到最大這段 區間內,傳感器所測位移較小,靈敏度高、適用與測量微* M級的微小位移、震 動或者是材料表面狀態等;那么曲線中的 B段,所測位移較大,但靈敏度低。本實驗采用的是傳光型光纖,它由兩束光纖混合后,組成丫型光纖,半園分布即雙D型一束光纖端部與光源相接發射光束,另一束端部與光電轉換器相接接收光束。兩光束混合后的端部是工作端亦稱探頭,它與被測體相距X,由光源發出的光纖傳到端部出射后再經被測體反射回來
17、,另一束光纖接收光信號 由光電轉換器轉換成電量,而光電轉換器轉換的電量大小與間距X有關,因此可用于測量位移。五、實驗注意事項1、實驗時注意光纖探頭與反射面保持平行,調整光纖探頭使其位于反射面 的圓心上。2、實驗前應用紙巾擦拭反射面,以保證反射效果。六、實驗步驟1、根據圖9- 1安裝光纖位移傳感器,二束光纖插入實驗板上的座孔上。 其內部已和發光管D及光電轉換管T相接。圖9-1光纖傳感器安裝示意圖2、將光纖實驗模板輸出端 VO1與數顯單元相連,見圖 9-2。接主控箱電源輸出圖9-2光纖傳感器位移實驗接線圖接主控箱數顯表3、調節測微頭,使探頭與反射面圓平板接觸。4、 實驗模板接入土 15V電源,合上
18、主控臺電源開關,調RW使數顯表顯示值最小,然后微調測微頭使數顯表顯示為0.000電壓選擇置2V檔)。5、 旋轉測微頭,被測體離開探頭,每隔0.05mm讀出數顯表值,將其填入下表:X(mm>V(v>6、根據上表數據,作光纖位移傳感器的位移一一輸出曲線圖。計算在量程1mm時靈敏度和非線性誤差。七、實驗報告在實驗報告中填寫實驗報告二十五,詳細記錄實驗過程中的原始記錄 數據、圖表、波形等)并結合原始記錄進一步理解實驗原理。八、實驗思考題根據實驗步驟6)中的光纖位移傳感器的位移一一輸出曲線圖,分析其原理。實驗三機械手接近覺實驗機器人運動學描述了機器人關節與組成機器人的各剛體之間的運動關系主要
19、包括機器人末端手的位姿分析、速度分析、加速度分析等。當已知所有關 節變量時,可用正運動學來確定機器人末端手的位姿。如果要使機器人末端手 放在特定的點上并且具有特定的姿態,可用逆運動學來計算出每一關節變量的 值,以此來實現對機器人進行運動分析、離線編程、軌跡規劃等工作。機械手 是應用計算機控制技術的教案實驗裝置本實驗裝置是一種具有接近覺、接觸 覺、滑動覺、力覺、熱覺等五種感覺的兩自由度智能機械手,所有感覺集中于 手爪部位,通過手爪對模擬工件的操作,實現感覺信息的測量。在該實驗裝置 上,可單獨完成以下機器人感覺實驗:接近覺實驗接觸覺實驗滑動覺實驗 -力覺實驗-熱覺實驗-示教和再現操作 工作方式類同
20、于一般示教再現機器人)-自適應抓取實驗 抓取雞蛋、玻璃瓶等易碎物)-多信息融合算法實踐作為實驗裝置,它使學生直接面對科學研究前沿,除多個實驗可做生動的 演示外,在信息處理部分可以融入自己的算法思想。在技術上,它具有控制方 式靈活、人機界面友好、實驗系統結構開放等特點。可作為“機械制造及其自 動化”、“自動化”、“電子信息項目”等本科專業機器人技術課程的實 驗裝置,也可用作相關專業研究生實踐及研究開發平臺。整個實驗裝置由機械手本體、控制器、計算機等三部分組成,系統組成示 意圖如圖0-1所示。機械手本體由多感覺手爪頭驗裝控示教、實驗糊底座帶I彳SYSTEM,手爪的張開口在腕部) 閉合及手臂的升降均
21、由升降筒、支撐力柱和步進電機驅動。手爪為絲動,螺母與升降筒固定在一起,由控制器由控制面板 含液晶顯示)、傳感 虛擬儀器構實現手爪開合。升降是滾珠絲杠傳 反導軌保持其覺覺。、0傳屈熱覺就手控制板、電動精度、控制面板晶顯示)是人機界面,由按鍵輸機驅動器、直流電源入,液晶輸出。傳感器信號處理板完成各種感覺信息的模擬信號處理,分別輸機械手本體£dt孌呻如出到PC機和機械手控制板。機械手控制板包括感覺信號的A/D轉換、鍵盤輸入處理和各種實驗功能的實現 含手爪及升降電機的控制)。計算機是各種感覺信息的演示界面,用LABVIEW軟件開發,能用多個窗口觀察各個感覺信息的實時變化,并進行多感覺信息融合
22、算法的實踐。實驗主菜單界面首先將介紹具體的軟件運行界面,以及菜單的使用方法。在打開多感覺機 械手實驗裝置軟件后,將直接彈出如圖 0-2所示的實驗菜單界面:杭州電子工學機器人研究所ill, B圖0-2實驗菜單界面由圖0-2可知,實驗菜單界面主要由標題框和菜單框組成。其中菜單框共包含7個菜單項,每個菜單項分別是一個實驗的入口,要進入某個實驗只需單擊相應的菜單項,本實驗系統可以提供的實驗分別是:1. 自適應抓取實驗在自適應抓取實驗中,將完成同時對 4個傳感器的數據采集并顯示數據的波形,而且可以實現將某個傳感器信號窗口進行放大觀察的功能。2. 未知材料特征值提取實驗在未知材料特征提取實驗中主要完成對未
23、知材料的力覺特征和熱覺特征的提取,并且提供一組參數,這些參數將在后續的多信息融合實驗中用來判斷機械手所抓取的工件的材質3. 多信息融合實驗在多信息融合實驗中將使用未知材料特征提取實驗中所獲取的數據進行處 理和判斷,并給出機械手所抓物體屬于某種材料的概率。4. 接近覺實驗在接近覺實驗中,將實現對單一的接近覺傳感器信號的數據采集和分析。5. 觸滑覺實驗在觸滑覺實驗中,將實現對單一的觸滑覺傳感器信號的數據采集和分析。6. 力覺實驗在力覺實驗中,將實現對單一的力覺傳感器信號的數據采集和分析。7. 熱覺實驗在熱覺實驗中,將實現對單一的熱覺傳感器信號的數據采集和分析。在完成實驗以后要退出實驗菜單,可按下實
24、驗菜單界面的最下方的退出 鍵,如果要重新開始運行,可以點擊位于 windows工具欄上的空箭頭按鈕 如圖 0-3所示),它將再次啟動程序。上_1_iL _ _l rj_j_CTTT. IFile Edit Operate Tools Window Help重新開始按鈕圖0-3實驗菜單界面注意:除了可以在實驗菜單中手工的選擇做某個實驗,也可以由控制箱選擇作某 個實驗,即在控制箱上通過按鍵選擇作何種實驗,可以通過單片機和計算機的 通信可以實現軟件自動選擇作的實驗。為了讓軟件自動實現實驗的選擇,必須 確保從控制箱的串行通信線正確的接到計算機的COM 1口。假如串行通信線未成功連接,計算機將需要手工的
25、選擇作何種實驗,即通過菜單上的按鍵來實現 實驗的選擇。實驗一機械手操作實驗一、實驗目的1. 了解機械手的控制結構和示教方式。2.二、實驗裝置三、實驗原理機械手控制結構框圖)如圖1-1所示。感覺信息模擬輸入8155 接口圖中圖1-1多感覺機AD手控制系統結構示意圖8155接口負責機械手張開極限和升降極限位置的2864數據存儲AI/O檢測、對液晶的輸出顯示控制=ADC0809完成對各種感覺信號片機轉換并輸入到計算機;2864芯片用于存儲各沖個數的經數數據,兩塊 喰完成對步進電輸出脈沖信號信號及制計數。步進電機轉角及速度手爪8253 接口揺懈鳥工柞就瘩雖奇8253 接口THK-1 變圖控制器面板嚨實
26、般機械吝攬劇黑I T)上的相應鍵操縱手臂、使之完成預期的軌跡。操作者可通過液機械手位置等° - - - 莫式工作流程如圖圖模式選I工示教4四、操作步驟:模式確認(確認鍵)1 熟悉操作面板,顯過面容上的“模式"按鈕選擇示教工作模式,顯示如下:口 ° Mode : TEACHMode : TAACA : 2387G: 000C2 按確認鍵,進入示教模式,顯工作區選擇A-D (工作區鍵)JMode: TEACH J動作示教(使用手臂升、* 00 A : 2AF0 G : 0°0刪除示教區工作點(刪除鍵) 降其中手A開、合鍵實前工作區為A區 可通過工作區鍵切換至
27、無工作點數記憶(記憶作點最大可保存 60點,不能超出;B、C、D 區示教工作點數減1 出;刪除最后工作、,目前手臂當前位置;G: 0000表明手爪當前位置。示教工作點數加13 (最教過程點可以利用手爪的開、合,手臂的升、降點動和連續動作實現任務。示教完成Mode : TEACHA 00 A : 20A0 G : 0000按下“記憶”鍵,系統將機械手此運動過程保存下來供再現使用,顯示如下:“刪除”鍵實現。該功能鍵按下后,將當前示教區最后一個示教工作點刪除,如此反復操作,可刪除當前示教區所有工作點,以備新的示教程序使用。顯示如下:表明當前再現任務工作區為A區,工作區示教點數為6。6 按下“確認”鍵
28、后機械手將先執行回原點<尋找絕對原點)操作,然后按照示教順序完成示教任務。顯示如下:Mode : PALYBACKA 06STEP 0102、STEF 01表明當前機械手正在完成第一個示教點的工作任務,然后依次是03、04、05、06,然后停止。再次按下“確認”鍵后重復上述操作過程。實驗二接近覺實驗、實驗目的了解機器人接近覺的工作原理。、實驗裝置多感覺機械手實驗裝置。PCI6024E采集卡。計算機機械手控制結構 < 框圖)如圖1-1所示。感覺信息模擬輸入L<>輸出脈沖頻率信號控制圖1-1多感覺機械手控制系統結構示意圖圖中,8155接口負責機械手張開極限和升降極限位置的I
29、/O檢測、對液晶的輸出顯示控制;ADC0809完成對各種感覺信號的AD轉換并輸入到計算機;2864芯片用于存儲各個實驗的經驗數據,兩塊8253完成對步進電機的脈沖信號輸出及其計數。接近THKT 嚶板搟林拈耳1-2控圖紅外過調制的擾的消除由信號調制和專用紅外濾光片保證。<S)品所示。環發光管發射經紅外光干設輸出信號VOut代表反射光強,則Vout是探頭至工件間距離X的函數:Vout=f(x , p>式中p表示工件的反射系數。當工件為p值一致的物體時,X和Vout對應。典型的響應為非線性曲 線,如圖2-2所示,X距離的推算根據預先對各種目標物的接近覺測量實驗數 據通過插值得到。反射系數
30、p與目標物表面顏色、粗糙度等有關,當目標物顏色較深、接近 黑色或透明時,反射光很弱。若以輸出信號達到某一閾值作為“接近”時,則 對不同目標物,因其表面的顏色和粗糙度是不同,“接近”的距離是不同的。 紅外光強法接近覺對大多數目標物是能找到“接近”感覺的,所以這一并不十 分精確的簡單測距系統用做機器人的接近覺是完全能夠勝任的。+5V發射目圖2-1紅外光強法接近覺原理射部分和接收部 物2-3,調制信號 <方波)圖2-2接近覺響應曲線其調制頻率由R1、NE555號調制與發射部分采用6 Vout接近覺信號處理電路分為;B方波調制R2、C2確定,改變電阻 R2可改變占空比。調制頻率約為 500HnW
31、中虛線框為 接近傳感器的紅外發光管部分電路見+5發射ARCCVQDISTHRi Q241R35TRIGDNCVo It G3+5接收BC 圖2-3R71 0£+5接近覺信號調制與發射8IC3R9_C圖亠"T接收與解"-RT2匕IC5C信號接收及解調電路如圖 于檢測所接R11輸出攵的紅外光強度,電E路中C3起直流隔離作用影響,后續電路由模擬開關和運放組成的混合電路實現解調功能,控制邏輯相反。在正負半周分 命出時變為其纟-12D R16C5A, IC5C為雙向C、的方波在輸模擬開關,控制信號由圖中R8;4B運放正負對稱出直流信號與接近距離的對應關系。解調過程波形分析如圖R6電路接入言對值,經低通2-5所示。別控制不同的濾波完成輸1R14R15發射信號G四、操作步調制信號2-5接近覺信號解調過程波形有效I的接1 將多感覺機械手實驗蜚!置與2 控制箱操作。IrT-熟悉操作面板,選擇接近t近信號位機通過采集卡聯接t A干擾信號tMode : PROXIMITY通過手臂“上升”、“下降”鍵和手爪“張開”、“合攏”鍵將機械手調整至合適的實驗位置,也即是手爪正常合攏可以實現對目標
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯系上傳者。文件的所有權益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網頁內容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經權益所有人同意不得將文件中的內容挪作商業或盈利用途。
- 5. 人人文庫網僅提供信息存儲空間,僅對用戶上傳內容的表現方式做保護處理,對用戶上傳分享的文檔內容本身不做任何修改或編輯,并不能對任何下載內容負責。
- 6. 下載文件中如有侵權或不適當內容,請與我們聯系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 2025年注會考生需建立的復習適應性與反思機制試題及答案
- 2024年項目管理核心試題及答案
- 農藝師考試問題解析技巧試題及答案
- 項目管理文件管理試題及答案
- 2024年微生物技術的市場潛力試題及答案
- 注會考試全科試題及答案解析
- 水鉆過路打孔施工方案
- 生產橋拆除重建施工方案
- 考生必看2025年證券試題及答案
- 電玩具高級多傳感器融合技術考核試卷
- 《中國糖尿病防治指南(2024版)》解讀
- 糖尿病患者的足部護理
- 土地流轉合同補充協議書
- 七年級語文下冊《登幽州臺歌》課件
- 兼職勞務協議合同模板
- 2025-2030中國改性塑料市場盈利能力預測及發展機遇規模研究報告
- 2025全國國家版圖知識競賽題庫及答案(300題)中小學組試題及答案
- 2025年河南機電職業學院高職單招語文2019-2024歷年真題考點試卷含答案解析
- (二模)東北三省三校2025年高三第二次聯合模擬考試 英語試卷(含答案解析)
- 靜脈輸液治療的健康教育
- GB/T 44569.1-2024土工合成材料內部節點強度的測定第1部分:土工格室
評論
0/150
提交評論