



版權說明:本文檔由用戶提供并上傳,收益歸屬內容提供方,若內容存在侵權,請進行舉報或認領
文檔簡介
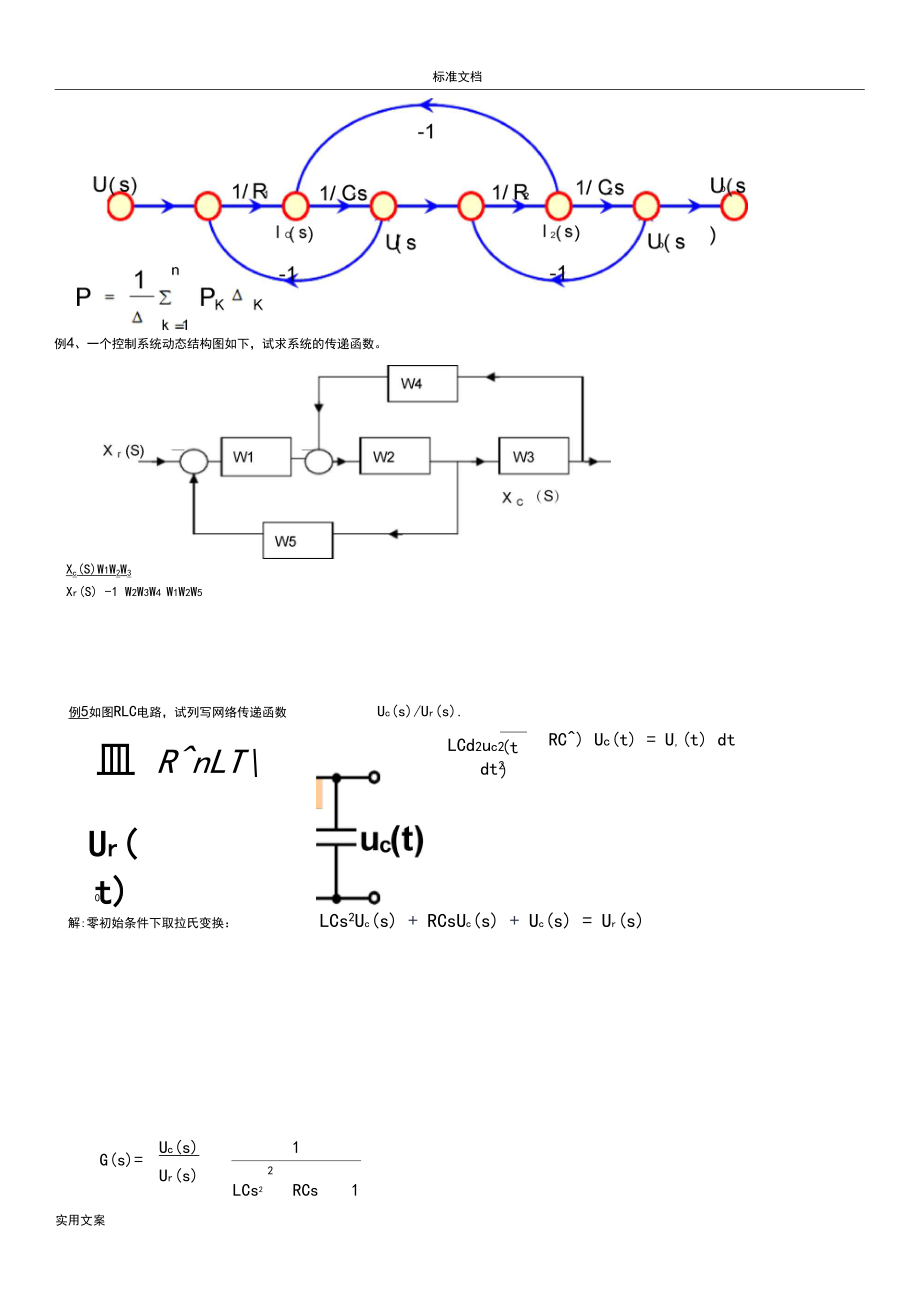
1、標準文檔第一章的概念1、典型的反饋控制系統基本組成框圖:復合控制方式。實用文案復合控制方式3、基本要求的提法:可以歸結為穩定性、準確性和快速性。第二章要求1、掌握運用拉氏變換解微分方程的方法;2、牢固掌握傳遞函數的概念、定義和性質;3、明確傳遞函數與微分方程之間的關系;4、能熟練地進行結構圖等效變換;5、明確結構圖與信號流圖之間的關系;6、熟練運用梅遜公式求系統的傳遞函數;Ci(s) C2(s)C2(s) G(S)_, _ _, _ _Ri(s) Ri(s)R2(s) R2(S)例1某一個控制系統動態結構圖如下,試分別求系統的傳遞函數Ci(s)Gi(s) C2(s)-GiG2G3Ri(s) -
2、 1 - GiG2G3G4 , Ri(s) - 1 - G£2G3G4例2某一個控制系統動態結構圖如下,試分別求系統的傳遞函數:C(s)Gi(s)G2(s)C(s)-G2(s)C(s) C(s) E(s) E(S)R(s) , N(s), R(s) , N(s)R(s) 1 G1(s)G2(s)H(s)N(s) 1 Gi(s)G2(s)H(s)例3:例4、一個控制系統動態結構圖如下,試求系統的傳遞函數。Xc(S)W1W2W3Xr(S) -1 W2W3W4 W1W2W5例5如圖RLC電路,試列寫網絡傳遞函數Uc(s)/Ur(s).皿 RnLTUr(t)LCd2uc2dt2(t)RC)
3、Uc(t) = U,(t) dt0解:零初始條件下取拉氏變換:LCs2Uc(s) + RCsUc(s) + Uc(s) = Ur(s)G(s)=Uc(s)Ur(s)12LCs2 RCs 1例6某一個控制系統的單位階躍響應為:C(t) =1 -2e+e,,試求系統的傳遞函數、微分方程和脈沖響應。-33s 2解:傳遞函數:G(s) =-3s上一(s 2)(s 1),微分方程:d-cn 3c9 2c(t) = 3dW 2r(t) dt2 dtdt脈沖響應:c(t) = -e' 4e't例Z一個控制系統的單位脈沖響應為C(t) =4e2 -e,,試求系統的傳遞函數、微分方程、單位階躍響
4、應。解:傳遞函數:G(s)3s 2,微分方程:(s 2)(s 1)d_cH 3dc( 2c(t) =3dr) 2r(t) dt2 dtdt單位階躍響應為:C(t) =1 -Ze? e上第三章本章要求:1、穩定性判斷1)正確理解系統穩定性概念及穩定的充要條件。 傳遞函數的極點均分布在平面的左半部。閉環系統特征方程的所有根均具有負實部;或者說,閉環2、3、1)2)3)2)熟練運用代數穩定判據判定系統穩定性,并進行分析計算。穩態誤差計算1)正確理解系統穩態誤差的概念及終值定理應用的限制條件。2)牢固掌握計算穩態誤差的一般方法。3)牢固掌握靜態誤差系數法及其應用的限制條件。動態性能指標計算掌握一階、二
5、階系統的數學模型和典型響應的特點。牢固掌握一階、二階系統特征參數及欠阻尼系統動態性能計算。掌握典型欠阻尼二階系統特征參數、極點位置與動態性能的關系。例1二階系統如圖所示,其中工=0.5,?=4(弧度/秒)當輸入信號為單位階躍信號時,試求系統的動態性能指標.解:;:=arctg = arctg 1(055 =60 =1.05(弧度)dtr"n7T-P- 2 =4 1 -0.52 =3.46-n.1 - 2346=0.60(秒)tpts3.5'-n3.50.5 4= 1.57(秒)A = 0.05crp=e100% =e_"二21 Q.52100% =16.3%ts4.
6、5- -n4.50.5 4= 2.14(秒)A = 0.02例3已知圖中Tm=0.2, K=5,求系統單位階躍響應指標。R(s)5?-(-)KS(TmS 1)C(s)解3:系統閉環傳遞函數為】(s)=G(s)1 G(s) - s(Tms 1) K化為標準形式中(s)=K/Tm222s2 s/Tm K/Tm s2 2 Ms . 一即有2 - n = 1/Tm=5,.n2=K/Tm=25解得Sn=5, t =0.5K23.5o%=e ” 父 100% = 16.3% ts = l=1.4秒 , n_n n n - P-tp = = 0.73 秒tr = = 0.486秒d -nJ- 2d例5:設控
7、制系統的開環傳遞函數系統為4s 5G=22s (s 2s 3),試用勞斯判據判別系統的穩定性,并確定在復平面的右半平面上特征根的數目。432解:特征方程:s 2s s 4s 5 = 0勞斯表控制系統不穩定,右半平面有兩個特征根。例6: 一個單位負反饋控制系統的開環傳遞函數為:G (S)=,要求系統閉環穩S(0.1S 1)(0.25S 1)定。試確定K的范圍(用勞斯判據)。解:特征方程:0.025s3 035s2 s K = 0勞斯表f0. 0251?K0. 35-0.025s 0.35系統穩定的K值范圍(0, 14)4 r 32例6:系統的特征方程:s 7 s 17 s 17 s 6 = 0解
8、:列出勞斯表:J 1176?71701 14.57 6- 14.12型別靜態誤差系數階躍輸入r(t) = R 1(t)斜坡輸入r(t) = Rt加速度輸入r(t)=Rt%VKpKvKat = R/(1 + Kp)ess = R Kvess = R Ka0K00R(1 + K)OOOOIOOK00RKOOnOOOOK00R KmOOOOOO0003 O因為勞斯表中第一列元素無符號變化,說明該系統特征方程沒有正實部根,所以:系統穩定。第四章根軌跡1、根軌埔方程 *K II (s - Zj ) j /nj (2 k 1)二 二e(k =0, -1,-2,)口 (s - Pi) i 1m * K i【
9、|s -Zj |二 1 n,i【I s - Pi I i 12、根軌跡繪制的基本法則mn“ (s- zj)八(s- pi) = (2k 1)二j =1i T3、廣義根軌跡(1)參數根軌跡(2)零度根軌跡XXXQ例1:某單位反饋系統,(1)(2)(3)實軸根軌跡(0,漸近線:3條。漸近線的夾角:3條根軌跡的起點為' Pi 一Zii 1i 1電=0 ( -1) ( -2)d= 一 1漸近線與實軸的交點:n - m(2k+ 1)兀(4) 得:(5)分離點:n - m二03-07t3,與虛軸的交點d1 -0.42, d2=-1.58 (舍去)系統的特征方程:1 . G(s)H(s)=0 即(s
10、3 3s2 2s K2 2j K = 02實部方程:一 3, K = 0虛部方程:一 3 . 2-=0解得:臨界穩定時的K=6o(舍去)2 2 +V2*K =6-0*K =0K為可變參數的根軌跡圖;由(1)根軌跡的起點為p1 =0, p2 = p3 =-0.5;終點為00(無開環有限零點)(2)根軌跡共有3支,連續且對稱于實軸;(3)根軌跡的漸近線有 n -m = 3條,(2k 1)二(- = 60 ,180 ;二 an -mPi0.33;(4)實軸上的根軌跡為0,-0.5=(-叼0.5;(5)分離點,其中分離角為 ±n /2 ,分離點滿足下列方程n 11'1-id d -
11、Pi dd 0.5例2已知負反饋系統閉環特征方程D(s) =s3 +s _0 +0.25K =0; + 0.25s+0.25K =0,試繪制以根軌跡圖確定系統臨界穩定時的K值;2s(s 0.5)解 特征方程D(s)=s3 +s2 +0.25s+0.25K =0得根軌跡方程為0.25K 1八,_斛方程得 d = 0 0.17;6(7)根軌跡與虛軸的交點:將 S = j。代入特征方程,可得實部方程為虛部方程為6 +0.25 6=0;.*2=35, K =1由根軌跡圖可得系統臨界穩定時K =1;由上述分析可得系統概略根軌跡如右圖所示:由根Ks(s 4)(s 6)(1)3條根軌跡的起點為P1 = 0,
12、 P2 = -4, P3 = -6;(2)漸近線:3條。漸近線的夾角:180 (2k 1)3-1=60 ,180(3)漸近線與實軸的交點:分離點:1 . _Jd d 4(0 4 6) - 03=0=一3.3332例3已知負反饋系統閉環特征萬程D(s)=s +10s +24s + K =0,試繪制以K為可變參數的根軌跡圖軌跡圖確定系統臨界穩定時的K值.32解特征方程D(s)=s +10s + 24s + K = 0得根軌跡方程為得 d1 = -1.57 (舍去)d2 = -5.1即 3d2 20d 24 =0(4)與虛軸的交點系統的特征方程:s(s+4)(s+6)+K *=0令S= j代入,求得
13、實部萬程:10,2 -K =0虛部方程: 3 -24 - 0解得: &=叫.9飛=0 (舍去)- /* *K =240K =0臨界穩定時的K =240'第五章 本章要求:1、正確理解頻率特性基本概念;設ui(t) =ASinmt ,貝U Ui(s) =Uo(s)=Ts 1As21 2匕小 A I-t/TAU0(t)=;2 re :2 2 Sin ( t - arctg T )1 .T12t2私、心、刀里" -t+ :2 2其中: A(8)=1/U1 + 0 T ,中(6)= arctg c AuosSin ( t - arctg T); A A( ) sin t ()
14、,1 2T 2Cs(t) = AG(j8) sin8t + 邛 +/G(j8 )A3)= Gj)()二 G(j ) G(j y A( )ej ( )2、掌握開環頻率特性曲線的繪制;(1)開環幅相曲線的繪制方法1)確定開環幅相曲線的起點 缶=°林口終點81毛;2)確定開環幅相曲線與實軸的交點(-X , 0)Im G ( j x) H ( j ' x) 二°或 邛(0x)=/G(j0x)H(jM)=kn; k=°. ±1,±2,LLU6 x為穿越頻率,開環幅相曲線曲線與實軸交點為Re 'G ( j x)H ( j x)G ( j r
15、)H ( j x)3)開環幅相曲線的變化范圍(象限和單調性)。標準文檔(2)開環對數頻率特性曲線1)開環傳遞函數典型環節分解;2)確定一階環節、二階環節的交接頻率,將各交接頻率標注在半對數坐標圖的切 軸上;3)繪制低頻段漸近特性線:低頻特性的斜率取決于K /® ”還需確定該直線上的一點,可以采用以下三種方方法一:在0 < 8min范圍內,任選一點切0,計算:La(« 0 ) = 20 lg K - 20V 1g 0 0方法二:取頻率為特定值.0 =1,則La(1) = 201g K 1方法三:取La(,0)為特殊值0,則有K/;=1,即 0 = K"4)每兩
16、個相鄰交接頻率之間為直線,在每個交接頻率點處,斜率發生變化,變化規律取決于該交接頻率對應的典型環節的種類,如下表所示。3、熟練運用頻率域穩定判據;奈氏判據:反饋控制系統穩定的充分必要條件是閉合曲線r 包圍臨界點(-1,j0)點的圈數 R等于開環傳GH遞函數的正實部極點數 P。Z = P R= P 2N4、掌握穩定裕度的概念;相角裕度:系統開環頻率特性上幅值為 1時所對應的角頻率稱為幅值穿越頻率或截止頻率,記為 0,即CA3 c); Gj c)H j c) = 1定義相位裕度為=1800G(j c)H(j c)例1. G(s)=肅亍試繪制其 Ks(is )G(j加二加p解 |G(j«)
17、 |= j K2 21 T2- 2Nyquist 圖。/G(j ) u-90 - arctgT 0 |G(j)zG(j)=-90二 |G(j)|=0G(j)=-180G(j)/-j5U( ) =ReG(j) =-#V( ) =ImG(j)lim U( ) =*Tlim V( ) 二 0 >0Im"(kTjO) o 上例2. G(S)二S2(1 T1s)(1 T2S)解: G(j ')=|G(j ')產K/G(j ) =-180 -arctgT 樣:-arctg T2 1實用文案.二o |G(j J|- - G(j ) = -180二個 |G(j ') |
18、 = 0 G(j ) = -360 G(j ) = ReG(j -) ImG(j )標準文檔實用文案例3. G(S) =解:K(T1S 1)S(T2s 1)(丁2 Tl)K|G(j ) =co22T122丁2G(j )二 0=-90 arctgT 1 - arctgT 2G(j )G(j )卜二G(j - )= 0k(T -丁2)1 T2 2G(j ) = -90G(j ) = -90j K(1T1T22)(1 T2 2)lim U ( ) = K (T1 - T2)例4已知兩個費資饋控制系統的開環傳遞函數分別為:(1) G(s) =lim V ( )=試分別作出幅相頻靴性;并用奈奎斯特判據判
19、斷各系統的穩定性。一10(1) G(j 1)- - arctg 0.1 1arctg 2 1,0.01 2 1 . 4 2 1起點:終點:KOE)10Um(2) G(s) =(0.1s 1)(2s 1)'s(s 1)(2s 1)穿過負實軸:x 0 A(-x)=0 G(j )2j( . -2 .3) -3 .2-900 - arctg , - arctg 2起點:終點:穿過負實軸:0X -20x3 =0 , 0x1=f , A9x) 1 .332504例5已知單位負反饋控制系統的開環傳遞函數分別為:(1) G(s) = (2) G(s)= 試s(5s 1)s(s 1)(2s 1)分別作出
20、幅相頻特性;并用奈奎斯特判據判斷各系統的穩定性。一5050(1) (1) G(jco)=-=,N-90arctg 5j (j5 1)25 .2 1起點:終點:穿過負實軸:x =0 A( -x) = 0 G(j -)432j( -2 ) -3 d 900 - arctg,f:一arctg 2 1穿過負實軸:®x -2x3 =0,8x1=忑,A$x)=2.67例3最小相位控制系統的開環對數幅頻特性如圖所示。試求開環傳遞函數G (S)。K( 1)傳遞函數:G(s)=s2( 1)' 12K在低頻段有LaQ,)=20lg = =co40 =20lg K = K =100所以系統開環傳遞
21、函數為100(0.25s 1)s2(0.01s 1)例4最小相位控制系統的開環對數幅頻特性如圖所示。試求開環傳遞函數 制系統的穩態誤差。G (S);并求單位斜坡函數輸入時閉環控G(s)=K(0.1s 1)s(0.25s 1)(0.01s 1)20lg K =60 .K =100 0Kv1 =0.0011000第六章本章要求:1、掌握常用校正裝置的頻率特性及其作用;2、掌握選擇校正裝置的方法;3、重點掌握串聯校正設計方法;4、了解反饋校正、復合校正的設計方法;目前工程實踐中常用的校正方式有串聯校正、反饋校正和復合校正三種。例1: 一個單位負反饋系統其開環傳遞函數為G(s) =-100,要求相位裕量不小于 50° ,校正后的0 :2 = 46.3 ,s(0.1s 1)試確定系統的串聯超前校正裝置。、100解:G(s)=/c” 一、作伯德圖,s(0.1s 1)c = 31.6, ( c) = 17.5°0( =4.
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯系上傳者。文件的所有權益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網頁內容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經權益所有人同意不得將文件中的內容挪作商業或盈利用途。
- 5. 人人文庫網僅提供信息存儲空間,僅對用戶上傳內容的表現方式做保護處理,對用戶上傳分享的文檔內容本身不做任何修改或編輯,并不能對任何下載內容負責。
- 6. 下載文件中如有侵權或不適當內容,請與我們聯系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 電梯清潔保養考核試卷
- 期貨市場應用考核試卷
- 電視機制造業的海外市場拓展策略考核試卷
- 水泥制品市場營銷策劃考核試卷
- 染色工藝對纖維性能的影響考核試卷
- 眼鏡行業政策與法規考核試卷
- 海洋環境教育與公民科學素養考核試卷
- 淀粉在保健品配方中的功能考核試卷
- 護理比賽之外科技能競賽
- 河南省安陽三十六中2025年高三年級第二學期期中考試數學試題試卷
- 慢病管理中心工作
- 國開電大《中國法律史》形考任務1-3
- 2024年度餐廳與旅行社旅游服務定制化合同3篇
- 層流手術室的管理
- 機電安裝安全措施方案
- 腸梗阻業務學習
- 電梯故障代碼表
- 地方導游基礎知識電子教案 專題七 學習情境三 寧夏回族自治區課時教案
- 中華人民共和國學前教育法-知識培訓
- 2024年四川省宜賓市中考英語試題含解析
- 擔保公司專項檢查方案
評論
0/150
提交評論