



版權說明:本文檔由用戶提供并上傳,收益歸屬內容提供方,若內容存在侵權,請進行舉報或認領
文檔簡介
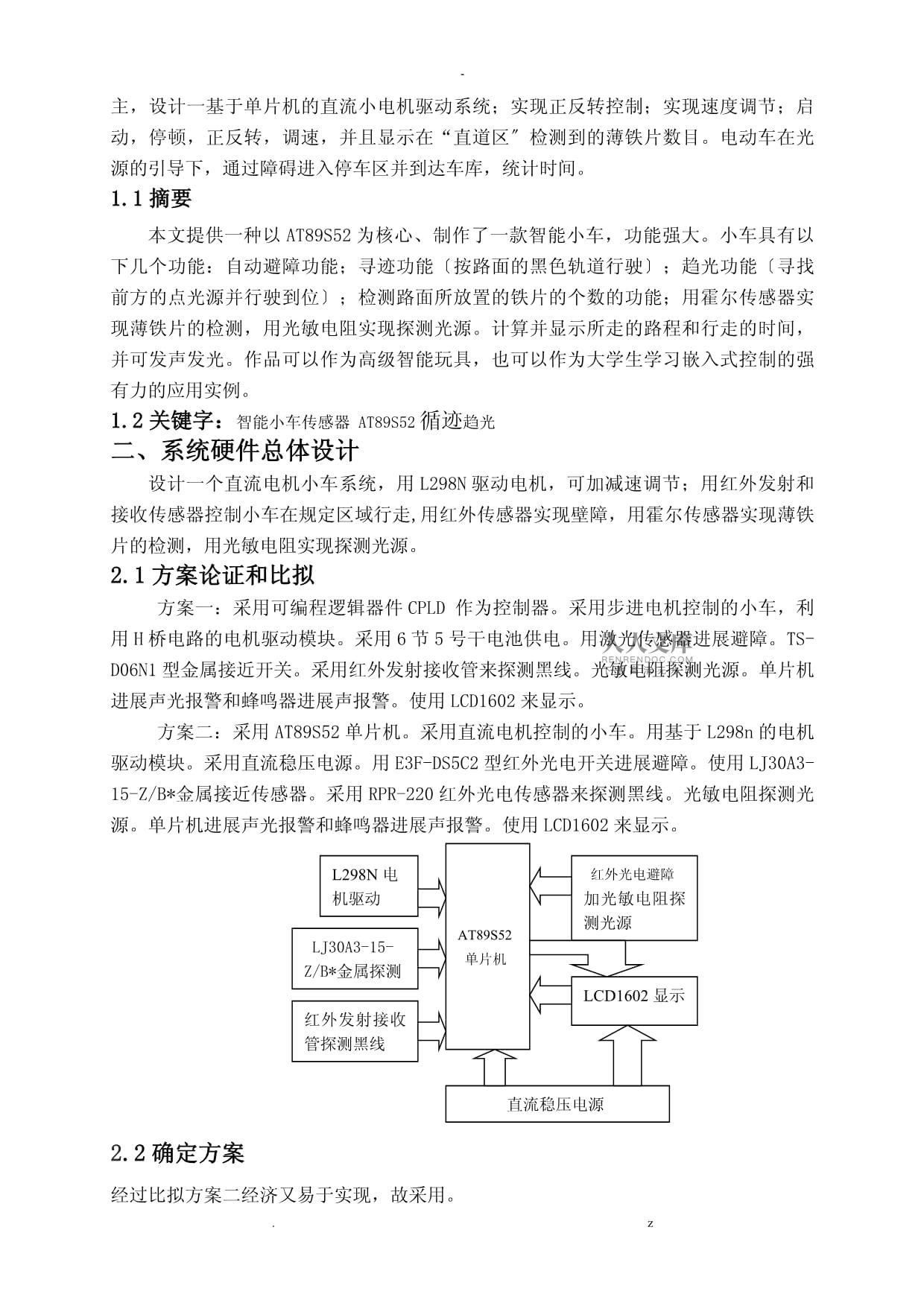
.z課程設計報告課程設計名稱:簡易智能小車目錄系統介紹1.1摘要………………31.2關鍵字……………3系統硬件總體設計2.1方案論證與比擬……………………32.2方案確定……………42.2.1控制器模塊……………………4電機驅動模塊…………………4探光模塊………………………4避障模塊………………………5金屬檢測模塊…………………52.2.6LM298PWN調車速局部…………5硬件電路設計與分析3.1控制器模塊………………………53.2電機驅動模塊……………………6四、系統軟件設計4.1系統軟件設計框圖……………74.2PWN調速控制程序………………7五、討論及進一步研究建議……………8六、設計心得與體會……………………8七、參考文獻……………8一、系統介紹智能車輛是一個運用計算機、傳感、信息、通信、導航、人工智能及自動控制等技術來實現環境感知、規劃決策和自動行駛為一體的高新技術綜合體.它在軍事、民用和科學研究等方面已獲得了應用,對解決道路交通平安提供了一種新的途徑。本文介紹的是一款采用兩片AT89S52單片機和LM298N為驅動直流電機的控制器其性價高,體積小,易操作,穩定度高。以單片機為核心能按鍵調節直流電機速度為主,設計一基于單片機的直流小電機驅動系統;實現正反轉控制;實現速度調節;啟動,停頓,正反轉,調速,并且顯示在“直道區〞檢測到的薄鐵片數目。電動車在光源的引導下,通過障礙進入停車區并到達車庫,統計時間。1.1摘要本文提供一種以AT89S52為核心、制作了一款智能小車,功能強大。小車具有以下幾個功能:自動避障功能;尋跡功能〔按路面的黑色軌道行駛〕;趨光功能〔尋找前方的點光源并行駛到位〕;檢測路面所放置的鐵片的個數的功能;用霍爾傳感器實現薄鐵片的檢測,用光敏電阻實現探測光源。計算并顯示所走的路程和行走的時間,并可發聲發光。作品可以作為高級智能玩具,也可以作為大學生學習嵌入式控制的強有力的應用實例。1.2關鍵字:智能小車傳感器AT89S52循跡趨光二、系統硬件總體設計設計一個直流電機小車系統,用L298N驅動電機,可加減速調節;用紅外發射和接收傳感器控制小車在規定區域行走,用紅外傳感器實現壁障,用霍爾傳感器實現薄鐵片的檢測,用光敏電阻實現探測光源。2.1方案論證和比擬方案一:采用可編程邏輯器件CPLD作為控制器。采用步進電機控制的小車,利用H橋電路的電機驅動模塊。采用6節5號干電池供電。用激光傳感器進展避障。TS-D06N1型金屬接近開關。采用紅外發射接收管來探測黑線。光敏電阻探測光源。單片機進展聲光報警和蜂鳴器進展聲報警。使用LCD1602來顯示。方案二:采用AT89S52單片機。采用直流電機控制的小車。用基于L298n的電機驅動模塊。采用直流穩壓電源。用E3F-DS5C2型紅外光電開關進展避障。使用LJ30A3-15-Z/B*金屬接近傳感器。采用RPR-220紅外光電傳感器來探測黑線。光敏電阻探測光源。單片機進展聲光報警和蜂鳴器進展聲報警。使用LCD1602來顯示。紅外光電避障加光敏電阻探測光源紅外光電避障加光敏電阻探測光源AT89S52單片機L298N電機驅動LCD1602顯示直流穩壓電源紅外發射接收管探測黑線LJ30A3-15-Z/B*金屬探測2.2確定方案經過比擬方案二經濟又易于實現,故采用。控制器模塊:AT89S52有8K字節在系統可編程Flash存儲器、32個可編程I/O口線、三個16位定時器/計數器、八個中斷源、全雙工UART串行通道、低功耗空閑和掉電模式、掉電后中斷可喚醒、看門狗定時器、雙數據指針、掉電標識符,適合小系統使用,因此我用AT59S52單片機作為控制器。電機驅動模塊方案一中:利用H橋電路的電機驅動模塊。此種電路包含假設干個三極管及外圍電阻等器件,通用性強,功能強大。通過對相關端口的寫入,能夠實現兩電機正反轉和pwm調速。但是,由于三極管本身工作電流的限制,此電路不能夠驅動大功率電機,并且電路暴露在外部導致穩定性不高,所以我們放棄使用該方案。方案二中:基于L298n的電機驅動模塊。L298N是一款專門用于驅動電動機的芯片,具有高集成度、高功率的特點,其輸出電流為2A,最高電流4A,最高工作電壓50V,可以驅動感性負載,如大功率直流電機,步進電機,減速電機,伺服電機,電磁閥等,較少的外圍電路〔僅需要保護用的二極管和濾波電容〕便可以很好地驅動大功率的電機。其輸入端可以與單片機直接相聯,從而很方便地受單片機控制。當驅動直流電機時,可以直接控制兩路電機,并可以實現電機正轉與反轉,實現此功能只需改變輸入端的邏輯電平。而且模塊體積小,穩定性高。綜上所述,選擇L298N及外圍電路作為電機驅動模塊。探光模塊尋找光源功能方案一:在小車前面裝上幾個光電開關,通過不同方向射來的光使光電開關工作,從而對小車行駛方向進展控制,根據光電開關特性,只有當光到達一定強度時才能夠導通,因此帶有一定的局限性。方案二:在小車前面裝上參數一致的光敏二極管或者光敏電阻,再通過A/D轉換電路轉換成數字量送入單片機,單片機再對讀入的幾路數據進展存儲、比擬,然后發出命令對外圍進操作。對方案一、二進展比擬,方案二硬件稍為復雜,但能夠對不同強度的光進展采集以及比擬,操作靈活,所以采用方案二。避障模塊用紅外光電開關進展避障。光電開關的工作原理:紅外發射二極管發射紅外線,如果遇到障礙物后,光線反射回來,承受的光感三極管導通,單片機承受到相應的電平信號。紅外避障模塊造價低,外圍電路簡單穩定。實際實驗中,模塊靈敏迅速,而且通過調節電路的可變電阻能夠實現對感知距離的改變〔0-30cm〕。此方案的缺點是對額定電壓要求比擬高,必須在5v左右,但是通過對整體系統的改造〔適量提高供電電壓〕,我可以完全克制這個問題,通過LM393電壓比擬器即可實現。金屬檢測模塊:方案1中:采用TS-D06N1型金屬接近開關。此模塊工作在10-36V,在9V下雖然也能正常工作,但是距離大于4mm的金屬就不能被檢測到。所以我放棄這方案。方案2中:使用LJ30A3-15-Z/B*金屬接近傳感器。這種傳感器工作在+6-+36V,在9V時在2cm左右,探測距離較大,所以我選用這方案。2.2.6LM298PWN調車速局部:PWM調速原理:PWM的原理:PWM〔PulseWidthModulation〕控制——脈沖寬度調制技術,通過對一系列脈沖的寬度進展調制,來等效地獲得所需要波形〔含形狀和幅值〕。只要控制LM298N的兩個使能端的脈沖寬度也就是上下電平的占空比,就可控制電機的轉向和速度,且可以到達動態靜止,有利于正反轉死區的消除。占空比:就是輸出的PWM中,高電平保持的時間與該PWM的時鐘周期的時間之比方,一個PWM的頻率是1000Hz,則它的時鐘周期就是1ms,就是1000us,如果高電平出現的時間是200us,則低電平的時間肯定是800us,則占空比就是200:1000,也就是說PWM的占空比就是1:5。軟件實現PWN調節:本小車使用了單片機定時器1us產生一次中斷,以10us為一個周期時間。可以很好的控制上下電平的時間,高電平可以在1,2,3,4,5,6,7,8,9,10毫秒之間任意按需要按鍵調節,從而調節了PWM的占空比。三、硬件電路設計與分析3.1控制器模塊:我使用2片AT89S52單片機為核心制作單片機最小系統,可作為啟動、停頓等按鍵。各單片機使用單片機上的外部中斷管腳進展通信。圖1單片機最小系統3.2電機驅動模塊:恒壓恒流橋式2A驅動芯片L298NL298是SGS公司的產品,比擬常見的是15腳Multiwatt封裝的L298N,內部同樣包含4通道邏輯驅動電路。可以方便的驅動兩個直流電機。L298N可承受標準TTL邏輯電平信號VSS,VSS可接4.5~7V電壓。4腳VS接電源電壓,VS電壓*圍VIH為+2.5~46V。輸出電流可達2.5A,可驅動電感性負載。1腳和15腳下管的發射極分別單獨引出以便接入電流采樣電阻,形成電流傳感信號。L298可驅動2個電動機,OUT1,OUT2和OUT3,OUT4之間可分別接電動機,本次制作選用驅動小車左右兩臺直流電動機,供應+5V和+9V電壓。圖3L298N電機驅動模塊四、系統軟件設計:系統軟件編程采用C語言實現了PWN調速功能和功能構架的實現,對功能實現和PWN波形控制,實現數據顯示以及兩機通信。為了方便系統管理和功能擴展,本系統軟件采用模塊化構造設計,使程序間的邏輯層次更加簡明。整個程序大局部的編譯和調試都在KeiluVision3的集成開發環境下來完成。4.1系統軟件設計框圖:主程序開場主程序開場顯示及系統硬件的初始化判斷*個鍵按下小車加速小車減速小車前進小車停頓功能實現功能鎖定小車后退4.2PWN調速控制程序:voidpwmout(){TMOD|=0*01;//定時器設置1msin12McrystalTH0=(65536-1000)/256;TL0=(65536-1000)%256;//定時0.5mSIE=0*82;//翻開中斷TR0=1;CYCLE=10;//時間可以調整這個是10步調整周while(1){if(!KEY1)//加速鍵{delay(30000);if(!KEY1) {PWM_Num++;dangwei(PWM_Num);}}if(!KEY2)//減速鍵 {delay(30000)if(!KEY2) {PWM_Num--;dangwei(PWM_Num);}}}}/*定時中斷*/voidtim(void)interrupt1using1{staticunsignedcharcount;TH0=(65536-1000)/256;TL0=(65536-1000)%256;//定時1mSif(count==PWM_ON){EC=1; //小車使能接口1EB=1; //使能接口2}count++;if(count==CYCLE){count=0; if(PWM_ON!=0)//如果左右時間是0保持原來狀態EC=0; //小車使能接口1EB=0; //使能接口2 }}五.討論及進一步研究建議本設計在調速局部發現做得不是很好!軟件做得再好,可硬件單單是LM298N加光耦是難以實現的。這就值得我去深思了,在不用步進電機的情況下可以很準確的看到調速效果嗎.直流電機可不可以呢.后面涉及用LM297N在LM298前面做細分,結果實現效果確實很好,很滿意。后面也就搭建LM297作為前級做細分完善小車。小車的功能得以創新及實現主要得益于選材的及方案確實定、軟件的實現等。六、設計心得與體會:這次設計題目的根本要求和發揮局部在調試時都根本實現。小車有時候會出錯,可能是硬件系統不穩定造成,用于用到兩塊52單片機,數據傳輸有可能存在不同步。還沒有把小車做得夠完善,我日夜調試終于功夫不負有心人調成了問題一個個解決,有種不吃飯也感到快樂的感覺。在這次設計中我們學到了很多軟硬件方面的知識,也發現很多缺乏,我還要進一步提高。但在這個困難的階段我學到了很多。這次親身體驗讓我有了深刻感觸,這不僅是一次實踐,還是一次人生經歷,是一生珍貴的財富。在今后我要參加更多的社會實踐,磨練自己的同時讓自己認識的更多,使自己未踏入社會就已體會社會更多方面。在本課題完成之際,我根底理論得到了進一步穩固和加深,同時在此根底上,我掌握了儀器儀表的硬件設計原理和軟件調試方法。但這些都離不開我身邊的教師和同學的大力幫
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯系上傳者。文件的所有權益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網頁內容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經權益所有人同意不得將文件中的內容挪作商業或盈利用途。
- 5. 人人文庫網僅提供信息存儲空間,僅對用戶上傳內容的表現方式做保護處理,對用戶上傳分享的文檔內容本身不做任何修改或編輯,并不能對任何下載內容負責。
- 6. 下載文件中如有侵權或不適當內容,請與我們聯系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 房地產委托代持合同樣本
- 銷售合同模板:分期付款協議指南
- 酒店裝修項目工程合同
- 建筑工程合同爭議處理:案例分析及展望
- 包裝設計師試題及答案
- 電導率儀操作規程
- 植物學試題+參考答案
- 裝飾裝修工程分包合同模板
- 相鄰土地購置合同
- 環保清潔工程合同書樣本
- 文獻檢索(寧夏醫科大學)知到智慧樹章節答案
- 2024年幼兒園教師繼續教育與職業發展
- 統計用產品分類目錄
- 天然氣管溝開挖合同(2篇)
- 消化道出血患者個案護理
- 心室附壁血栓護理
- 手術分級目錄(2023年修訂)
- 生化武器課件教學課件
- 演講比賽評分表和計分表
- 2024年涉密人員考試試題庫保密基本知識試題及答案解析
- 院內突發心跳呼吸驟停、昏迷、跌倒事件應急預案及程序
評論
0/150
提交評論