



版權(quán)說明:本文檔由用戶提供并上傳,收益歸屬內(nèi)容提供方,若內(nèi)容存在侵權(quán),請進行舉報或認(rèn)領(lǐng)
文檔簡介
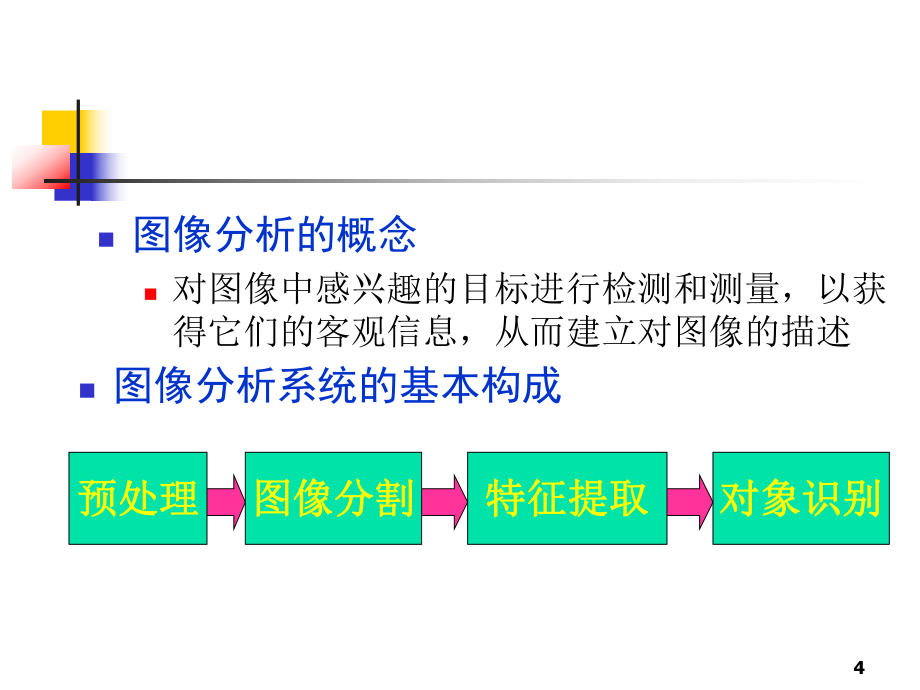
1、1Digital Image Processing 數(shù)字圖像處理數(shù)字圖像處理2第九章第九章 圖像分割圖像分割39.1 概述4n圖像分析的概念n對圖像中感興趣的目標(biāo)進行檢測和測量,以獲得它們的客觀信息,從而建立對圖像的描述n圖像分析系統(tǒng)的基本構(gòu)成預(yù)處理預(yù)處理圖像分割圖像分割特征提取特征提取對象識別對象識別5圖像輸入圖像輸入光電變換光電變換數(shù)字化數(shù)字化圖像增強圖像增強圖像恢復(fù)圖像恢復(fù)圖像編碼圖像編碼預(yù)處理預(yù)處理閾值分割閾值分割邊緣檢測邊緣檢測區(qū)域分割區(qū)域分割圖像分割圖像分割特征提取特征提取圖像識別圖像識別圖像分析理解圖像分析理解描述描述解釋解釋圖像處理過程圖像處理過程6n圖像分析的步驟n把圖像分割
2、成不同的區(qū)域或把不同的對象分開n找出分開的各區(qū)域的特征n識別圖像中要找的對象或?qū)D像進行分類n對不同區(qū)域進行描述或?qū)ふ页霾煌瑓^(qū)域的相互聯(lián)系,進而找出相似結(jié)構(gòu)或?qū)⑾嚓P(guān)區(qū)域連成一個有意義的結(jié)構(gòu)7圖像分割圖像分割圖圖像像8圖像分割圖像分割n圖像分割的概念n把圖像分成互不重疊的區(qū)域并提取感興趣目標(biāo)的技術(shù)9圖像分割圖像分割圖像分割的定義圖像分割的定義: :令集合令集合R代表整個圖像區(qū)域,對代表整個圖像區(qū)域,對R的分割可看作將的分割可看作將R分成分成N個滿足以下五個條件的非空子集(子區(qū)域)個滿足以下五個條件的非空子集(子區(qū)域)R1,R2,RN: Ri= R ; 對所有的對所有的i和和j,ij,有,有RiR
3、j =; 對對i = 1,2,N,有,有P(Ri) = TRUE; 對對ij,有有P(RiRj) = FALSE。其中其中P(Ri)是對所有在集合是對所有在集合Ri中元素的邏輯謂詞中元素的邏輯謂詞,代表代表空集。空集。 gdds10圖像分割圖像分割119.2 9.2 邊緣檢測邊緣檢測 12邊緣邊緣n邊緣的定義: 圖像中像素灰度有階躍變化或屋頂變化的那圖像中像素灰度有階躍變化或屋頂變化的那些像素的集合些像素的集合n邊緣的分類n階躍狀階躍狀n屋頂狀屋頂狀13邊緣邊緣階躍狀階躍狀屋頂狀屋頂狀邊緣邊緣邊緣邊緣 邊緣點的幾種情況:邊緣點的幾種情況: (1) (1) 空間曲面上的不連續(xù)點。空間曲面上的不連
4、續(xù)點。 ( (兩個不同曲面或平面的交線兩個不同曲面或平面的交線) ) (2) (2) 物體與背景的分界線。物體與背景的分界線。 (3) (3) 不同材料組成的邊緣線。不同材料組成的邊緣線。 (4) (4) 陰影引起的邊緣。陰影引起的邊緣。邊緣邊緣n基本思想:計算局部微分算子計算局部微分算子一階微分一階微分截面圖截面圖邊界圖像邊界圖像邊緣邊緣n一階微分:用梯度算子來計算n特點:對于亮的邊,邊的變化起點是正的,結(jié)束是負(fù)的。對于暗邊,結(jié)論相反。常數(shù)部分為零。n用途:用于檢測圖像中邊的存在n二階微分:通過拉普拉斯來計算18梯度算子梯度算子( , )xyfGxf x yfGy1222( )()xymag
5、 fGG)arctan(),(xyGGyx19梯度算子梯度算子1|xyMGG222xyMGG(,)xyMMax G G梯度算子梯度算子n幾種常用的邊緣檢測算子n梯度算子nRoberts算子nPrewitt算子nSobel算子nKirsch算子(方向算子)nLaplacian算子nCanny算子21梯度算子梯度算子9586xyGZZGZZ22梯度算子梯度算子789123369147(2)(2)(2)(2)xyGZZZZZZGZZZZZZ23梯度算子梯度算子)()()()(741963321987ZZZZZZGZZZZZZGyx24梯度算子梯度算子25梯度算子梯度算子為了檢測邊緣點,選取適當(dāng)?shù)拈撝?/p>
6、為了檢測邊緣點,選取適當(dāng)?shù)拈撝礣,對梯度,對梯度圖像進行二值化,則有:圖像進行二值化,則有:這樣形成了一幅邊緣二值圖像這樣形成了一幅邊緣二值圖像g(x,y)特點:特點:僅計算相鄰像素的灰度差,對噪聲比較僅計算相鄰像素的灰度差,對噪聲比較敏感,無法抑止噪聲的影響。敏感,無法抑止噪聲的影響。其它 0)Grad( 1),(Tx,yyxg26拉普拉斯拉普拉斯算子算子22222( , )( , )( , )f x yf x yf x yxy2( , )(1, )(1, )( ,1)( ,1) 4 ( , )f x yf xyf xyf x yf x yf x y 27拉普拉斯拉普拉斯算子算子 28拉普拉
7、斯拉普拉斯算子算子 29CannyCanny算子算子 30CannyCanny算子算子 31CannyCanny算子算子 32算子比較算子比較 33算子比較算子比較 34算子比較算子比較 35算子比較算子比較 36算子比較算子比較 (b) Robert算子邊緣檢測 (c) Sobel算子邊緣檢測 (d) Prewitt算子邊緣檢測 (e) Laplacian算子邊緣檢測 (f) Kirsch算子邊緣檢測(a) (b) (c) (d) (e) (f) 算子比較算子比較 梯度算子梯度算子Roberts算子算子Prewitt算算子子Kirsch算子算子原始圖像原始圖像Laplacian算子算子389
8、.3 9.3 邊緣跟蹤邊緣跟蹤 39邊緣跟蹤邊緣跟蹤 n出發(fā)點n由于噪音的原因,邊界的特征很少能夠被完整地描述,在亮度不一致的地方會中斷。n因此典型的邊檢測算法后面總要跟隨著連接過程和其它邊界檢測過程,用來歸整邊像素,成為有意義的邊。40邊緣跟蹤邊緣跟蹤 n邊緣跟蹤的概念n將檢測的邊緣點連接成線就是邊緣跟蹤n線是圖像的一種中層符號描述n由邊緣形成線特征的兩個過程n可構(gòu)成線特征的邊緣提取n將邊緣連接成線n連接邊緣的方法n光柵跟蹤n全向跟蹤n霍夫變換41基本步驟基本步驟42二值圖像邊界跟蹤二值圖像邊界跟蹤 43灰度圖像邊界跟蹤灰度圖像邊界跟蹤 44光柵掃描跟蹤光柵掃描跟蹤 n概念n是一種采用電視光
9、柵行掃描順序,結(jié)合門限檢測,對遇到的像素進行分析,從而確定是否為邊緣的跟蹤方法。45光柵掃描跟蹤光柵掃描跟蹤 n具體步驟:n(1)確定一個比較高的閾值d,把高于該閾值的像素作為對象點。稱該閾值為“檢測閾值” 。n(2)用檢測閾值d對圖像第一行像素進行檢測,凡超過d的點都接受為對象點,并作為下一步跟蹤的起始點。n(3)選取一個比較低的閾值作為跟蹤閾值,該閾值可以根據(jù)不同準(zhǔn)則來選擇。例如,取相鄰對象點之灰度差的最大值作為跟蹤閾值,有時還利用其他參考準(zhǔn)則,如梯度方向、對比度等。n(4)確定跟蹤?quán)徲颉H∠袼?i,j)的下一行像素(i+1,j-1),(i+1,j),(i+1,j+1)為跟蹤?quán)徲颉?6光柵
10、掃描跟蹤光柵掃描跟蹤 n(5)掃描下一行像素,凡和上一行已檢測出來的對像點相鄰接的像素,其灰度差小于跟蹤閾值的,都接受為對象點,反之去除。n(6)對于已檢測出的某一對象點,如果在下一行跟蹤領(lǐng)域中,沒有任何一個像素被接受為對象點,那么,這一條曲線的跟蹤便可結(jié)束。如果同時有兩個,甚至三個鄰域點均被接受為對象點,則說明曲線發(fā)生分支,跟蹤將對各分支同時進行。如果若干分支曲線合并成一條曲線,則跟蹤可集中于一條曲線上進行。一曲線跟蹤結(jié)束后,采用類似上述步驟從第一行的其他檢出點開始下一條曲線的跟蹤。47光柵掃描跟蹤光柵掃描跟蹤 n(7)對于未被接受為對象點的其他各行像素,再次用檢測閾值進行檢測,并以新檢出的
11、點為起始點,重新使用跟蹤閾值程序,以檢測出不是從第一行開始的其他曲線。n(8)當(dāng)掃描完最后一行時,跟蹤便可結(jié)束。48光柵掃描跟蹤光柵掃描跟蹤 49光柵掃描跟蹤光柵掃描跟蹤 n由結(jié)果可以看出,本例原圖像中存在著三條曲線,兩條從頂端開始,一條從中間開始。然而,如果不用跟蹤法,只用一種閾值d或t檢測均不能得到滿意的結(jié)果。n檢測和跟蹤所選擇的特征可以不是灰度級,而是其他反映局部性質(zhì)的量,例如對比度、梯度等。此外,每個點所對應(yīng)的鄰域也可以取其他的定義,不一定是緊鄰的下一行像素,稍遠一些的領(lǐng)域也許對于彌合曲線的間隙更有好處。n光柵掃描跟蹤和掃描方向有關(guān)。50全向跟蹤全向跟蹤 n如果能使跟蹤方向不僅局限于逐
12、行(或列)的光柵式掃描,譬如說,在從上而下(或自左而右)的掃描過程中,也可以向上(或向左)跟蹤,那么就會克服光柵跟蹤依賴于掃描方向的缺點。這可以通過定義不同鄰域的方法來實現(xiàn)。同樣,如果我們選取的跟蹤準(zhǔn)則能夠辨別遠非緊鄰的像素,那么光柵跟蹤會漏掉平行于掃描方向曲線的缺點也能得到適當(dāng)?shù)乜朔H蚋櫨褪歉櫡较蚩梢允侨我夥饺蚋櫨褪歉櫡较蚩梢允侨我夥较颍⑶矣凶銐虼蟮母櫨嚯x的跟蹤方法。向,并且有足夠大的跟蹤距離的跟蹤方法。顯然,全向跟蹤是改變了鄰域定義和跟蹤準(zhǔn)則的一種光柵跟蹤法。51Hough 變換變換 52Hough 變換變換 53Hough 變換變換 n問題的提出n在找出邊界點集之后,需
13、要連接,形成完整的邊界圖形描述54Hough 變換變換 n基本思想n對于邊界上的n個點的點集,找出共線的點集和直線方程。n對于直角坐標(biāo)系中的一條直線l,可用、來表示該直線,且直線方程為: 其中,為原點到該直線的垂直距離,為垂線與x軸的夾角,這條直線是唯一的。n構(gòu)造一個參數(shù)的平面,從而有如下結(jié)論:sincosyx對應(yīng)一條直線對應(yīng)一條直線(,)直角坐標(biāo)系中的一條直線直角坐標(biāo)系中的一條直線對應(yīng)極坐標(biāo)系中的一點,對應(yīng)極坐標(biāo)系中的一點,這種線到點的變換就是這種線到點的變換就是HoughHough變換變換 55Hough 變換變換 n基本思想56Hough 變換變換 n算法實現(xiàn):n使用交點累加器,或交點統(tǒng)
14、計直方圖,找出相交線段最多的參數(shù)空間的點,然后找出該點對應(yīng)的xy平面的直線線段。57Hough 變換變換 n算法步驟:n1在、的極值范圍內(nèi)對其分別進行m,n等分,設(shè)一個二維數(shù)組的下標(biāo)與i、j的取值對應(yīng);n2對圖像上的所有邊緣點作Hough變換,求每個點在j(j0,1,n)Hough變換后的i ,判斷(i、j)與哪個數(shù)組元素對應(yīng),則讓該數(shù)組元素值加1;n3比較數(shù)組元素值的大小,最大值所對應(yīng)的(i、j)就是這些共線點對應(yīng)的直線方程的參數(shù)。58Hough 變換變換 n算法特點:n對、量化過粗,直線參數(shù)就不精確,過細(xì)則計算量增加。因此,對、量化要兼顧參數(shù)量化精度和計算量。nHough變換檢測直線的抗噪性能強,能將斷開的邊緣連接起來。n此外Hough變換也可用來檢測曲線。 59 應(yīng)用應(yīng)用HoughHough變換對傾斜表格圖像糾偏變換對傾斜表格圖像糾偏(a) (a) 傾斜的表格圖像傾斜的表格圖像 (b) (b) 對對(a)(a)二值化二值化(c)Hough(c)Hough變換累加數(shù)組變換累加數(shù)組 (d)(d)最長直線的角度糾正傾斜圖最長直線的角度糾正傾斜圖像像pqo60Hough 變換的擴展變換的擴展 nHoughHough變換是用于檢測平面內(nèi)的直線和二次曲線變換是用于檢測平面內(nèi)的直線和二次曲線的,實際應(yīng)用中,物體的輪廓不能用直線和二次的,實際應(yīng)用中
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯(lián)系上傳者。文件的所有權(quán)益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網(wǎng)頁內(nèi)容里面會有圖紙預(yù)覽,若沒有圖紙預(yù)覽就沒有圖紙。
- 4. 未經(jīng)權(quán)益所有人同意不得將文件中的內(nèi)容挪作商業(yè)或盈利用途。
- 5. 人人文庫網(wǎng)僅提供信息存儲空間,僅對用戶上傳內(nèi)容的表現(xiàn)方式做保護處理,對用戶上傳分享的文檔內(nèi)容本身不做任何修改或編輯,并不能對任何下載內(nèi)容負(fù)責(zé)。
- 6. 下載文件中如有侵權(quán)或不適當(dāng)內(nèi)容,請與我們聯(lián)系,我們立即糾正。
- 7. 本站不保證下載資源的準(zhǔn)確性、安全性和完整性, 同時也不承擔(dān)用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 教育心理學(xué)的多元智能觀與學(xué)生發(fā)展
- 教育技術(shù)在全球教育政策中的應(yīng)用與發(fā)展
- 臨終病人家屬的心理護理
- 教育心理學(xué)在教師心理健康中的運用
- 學(xué)生戀愛合同協(xié)議書模板
- 2025年探討電子商務(wù)與電子合同的發(fā)展趨勢
- 2025關(guān)于辦公場地租賃合同模板
- 智慧課堂中的心理導(dǎo)航-論教育心理學(xué)的應(yīng)用價值
- 教育行業(yè)的數(shù)據(jù)泄露事件應(yīng)急響應(yīng)機制研究
- 儒家文化與中醫(yī)思想
- 療養(yǎng)活動方案
- 第10章-氫發(fā)動機
- 子宮脫垂的治療與護理
- 養(yǎng)生自媒體的熱門內(nèi)容與傳播策略
- 20以內(nèi)加減法口算題(10000道)(A4直接打印-每頁100題)
- 導(dǎo)游業(yè)務(wù)培訓(xùn)課程大綱
- 景區(qū)劇場演藝策劃方案
- 可用性工程報告 - 醫(yī)療器械
- 導(dǎo)演聘用合同范本(全新完整版)
- 中國城市區(qū)域劃分表(超實用)
- PCBA審核表實用模板
評論
0/150
提交評論