


版權(quán)說明:本文檔由用戶提供并上傳,收益歸屬內(nèi)容提供方,若內(nèi)容存在侵權(quán),請(qǐng)進(jìn)行舉報(bào)或認(rèn)領(lǐng)
文檔簡(jiǎn)介
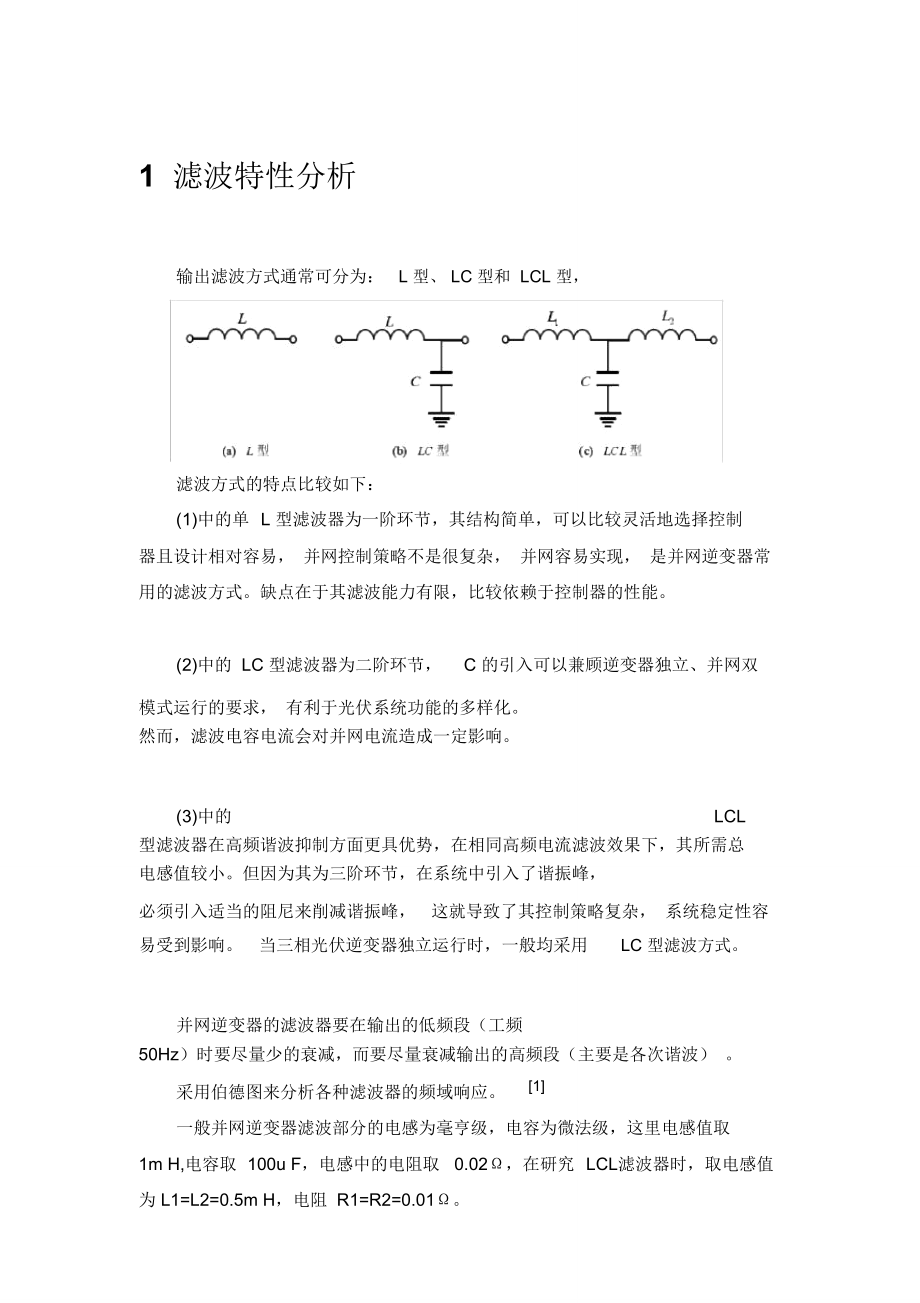
1、1 濾波特性分析輸出濾波方式通常可分為:L 型、 LC 型和 LCL 型,濾波方式的特點(diǎn)比較如下:(1)中的單L 型濾波器為一階環(huán)節(jié),其結(jié)構(gòu)簡(jiǎn)單,可以比較靈活地選擇控制器且設(shè)計(jì)相對(duì)容易, 并網(wǎng)控制策略不是很復(fù)雜, 并網(wǎng)容易實(shí)現(xiàn), 是并網(wǎng)逆變器常用的濾波方式。缺點(diǎn)在于其濾波能力有限,比較依賴于控制器的性能。(2)中的 LC 型濾波器為二階環(huán)節(jié),C 的引入可以兼顧逆變器獨(dú)立、并網(wǎng)雙模式運(yùn)行的要求, 有利于光伏系統(tǒng)功能的多樣化。 然而,濾波電容電流會(huì)對(duì)并網(wǎng)電流造成一定影響。(3)中的 LCL 型濾波器在高頻諧波抑制方面更具優(yōu)勢(shì),在相同高頻電流濾波效果下,其所需總電感值較小。但因?yàn)槠錇槿A環(huán)節(jié),在系統(tǒng)
2、中引入了諧振峰,必須引入適當(dāng)?shù)淖枘醽硐鳒p諧振峰,這就導(dǎo)致了其控制策略復(fù)雜, 系統(tǒng)穩(wěn)定性容易受到影響。當(dāng)三相光伏逆變器獨(dú)立運(yùn)行時(shí),一般均采用LC 型濾波方式。并網(wǎng)逆變器的濾波器要在輸出的低頻段(工頻 50Hz)時(shí)要盡量少的衰減,而要盡量衰減輸出的高頻段(主要是各次諧波) 。采用伯德圖來分析各種濾波器的頻域響應(yīng)。1一般并網(wǎng)逆變器濾波部分的電感為毫亨級(jí),電容為微法級(jí),這里電感值取1m H,電容取100u F,電感中的電阻取0.02,在研究LCL濾波器時(shí),取電感值為 L1=L2=0.5m H,電阻 R1=R2=0.01。1對(duì)于單電感濾波器, 以輸入電壓和輸出電流為變量, 并且實(shí)際的電感中含有一定電阻,
3、其傳遞函數(shù)為:對(duì)于采用 LC 濾波器的并網(wǎng)逆變器, 在并網(wǎng)運(yùn)行時(shí), 電網(wǎng)電壓直接加在濾波器中的電容兩端, 因此此時(shí)電容不起濾波作用, 可以看作是一個(gè)負(fù)載, 從濾波效果上來說,它等同于單電感濾波器。并且對(duì)于被控量選取為電感電流 IL 的采用LC濾波的并網(wǎng)逆變器, 由于有電容的作用, 其控制電流 IL 與實(shí)際輸出電流 Io 之間有如下圖所示:上式中可以看出, 電感電流 LI 將受到電網(wǎng)電壓 gU 的變化與并網(wǎng)電流 0I 的影響。所以在控制過程中要參照電網(wǎng)電壓的有效值不斷調(diào)整基準(zhǔn)給定的幅值與相位。對(duì)于 LCL 濾波電路,逆變器輸出電流與輸入電壓之間的傳遞函數(shù)可以表示為:2對(duì)比可知 ,可以很清楚的看到
4、, 在低頻時(shí),單 L 型濾波器與LCL 型濾波器的頻域響應(yīng)相同,都是以 20d B/dec 的斜率進(jìn)行衰減。但在高頻部分,單 L 型濾波器仍然以 20d B/dec 進(jìn)行衰減,但 LCL 型濾波器以 60d B/dec 的斜率進(jìn)行衰減,表明相對(duì)于單 L 型濾波器,LCL 型濾波器能夠更好地對(duì)高頻諧波進(jìn)行衰減。將式中的 s 用 j 代入后可以看出,低頻時(shí)兩式分母中含有 的項(xiàng)都很小,特別是 的高次方項(xiàng), 可以忽略不計(jì)。 因此在低頻時(shí), 表達(dá)式中主要起作用的是電阻部分。而隨著 的不斷上升, 兩式分母中含有 的項(xiàng)不斷增大, 特別是含有 的高次方項(xiàng),因此在高頻段,其主要作用的是分母中含有 的 3 次方項(xiàng)
5、。因此在高頻段, LCL 濾波器是以60d B/dec 的斜率進(jìn)行衰減。對(duì)單 L 型、 LC 型及LCL 型濾波器進(jìn)行比較。在低頻時(shí),三者的濾波效果相同, 并且在并網(wǎng)運(yùn)行時(shí)LC 型濾波器中的電容只相當(dāng)于負(fù)載,不起濾波作用。而LCL 型濾波器對(duì)高頻諧波的濾波效果要優(yōu)于單 L 型與 LC 型濾波器。2 數(shù)學(xué)模型2.1 L 型濾波器32.2 LC濾波器濾波器數(shù)學(xué)模型這里選擇電感電流、電容 C2 電壓為狀態(tài)變量,在三相平衡的情況下列出A、B、C 三相的狀態(tài)方程為:dq 軸下的數(shù)學(xué)方程為:則數(shù)學(xué)模型為:4控制器設(shè)計(jì) 1-5解耦控制為 6:在 dq 坐標(biāo)系下的電流狀態(tài)方程存在交叉耦合關(guān)系,為了降低控制器的
6、設(shè)計(jì)復(fù)雜程度,首先要進(jìn)行前饋解耦控制: 引入輸出濾波電感電壓和負(fù)載電壓前饋解耦,在電壓外環(huán)采用輸出濾波電容電流和負(fù)載電流前饋解耦。5當(dāng)逆變器工作在獨(dú)立模式時(shí), 通過控制逆變器輸出 LC 型濾波器濾波電容上電壓使逆變器工作在電壓源模式。 LC 型的控制框圖如圖。電容輸出電壓uc 與輸入電壓ui 以及負(fù)載電流 il 的關(guān)系式如式:將負(fù)載電流 il 當(dāng)做擾動(dòng)處理,得出電容電壓 uc 到輸入電壓 ui 環(huán)節(jié)的傳遞函數(shù):作出上式波特圖,圖中可看出 LC 型濾波器的系統(tǒng)為一個(gè)典型的二階系統(tǒng),在諧振頻率處也存在一個(gè)很大的諧振峰, 在諧振頻率處, 系統(tǒng)的相位裕度大大降低。逆變器電壓電流雙環(huán)控制根據(jù)電流內(nèi)環(huán)控制
7、對(duì)象不同,一般可以分為: 電壓外環(huán)電感電流內(nèi)環(huán)控制和電壓外環(huán)電容電流內(nèi)環(huán)控制。 3 雙環(huán)控制方案中的電流內(nèi)環(huán)用來增大系統(tǒng)的帶寬, 提高系統(tǒng)的動(dòng)態(tài)響應(yīng)水平, 電壓外環(huán)來保證電壓質(zhì)量。uaref為電壓指令信號(hào), uerr 為電壓誤差信號(hào), iaref內(nèi)環(huán)電感電流指令信號(hào),ierr 為電流誤差信號(hào),uam 為調(diào)制控制信號(hào),ia 為濾波電感電流,ica 為濾波電容電流, ioa 為負(fù)載電流, uoa 為輸出電壓, L 為濾波電感量, r 為等效電阻, C 為濾波電容量, G1(s) 為電壓調(diào)節(jié)器, G2(s) 為電流調(diào)節(jié)器。6Figure 2-1 電壓外環(huán)電感電流內(nèi)環(huán)上圖所示控制方案可以在電流內(nèi)環(huán)指令
8、值處增加限幅環(huán)節(jié)對(duì)開關(guān)管進(jìn)行限流保護(hù)。但是,由于負(fù)載電流ioa 擾動(dòng)在電流內(nèi)環(huán)之外,這削弱了其抗負(fù)載擾動(dòng)的能力。因此可在方案中增加負(fù)載電流前饋控制來提高逆變器的抗擾動(dòng)能力。為前饋系數(shù),當(dāng)其取值為 1 時(shí),相當(dāng)于電壓外環(huán)電容電流內(nèi)環(huán)控制,控制框圖如圖所示。 電容電流內(nèi)環(huán)不能對(duì)逆變器提供限流保護(hù), 實(shí)際應(yīng)用中須增加額外的措施來對(duì)逆變器進(jìn)行過流保護(hù),這增加了系統(tǒng)的復(fù)雜性。Figure 2-2 電壓外環(huán)電容電流內(nèi)環(huán)控制系統(tǒng)設(shè)計(jì)完成后, 需要對(duì)控制器參數(shù)進(jìn)行整定。 工程上,系統(tǒng)的參數(shù)整定有多種方法, 本設(shè)計(jì)中采用極點(diǎn)配置法。 極點(diǎn)配置法的主要思想是: 若已知某系統(tǒng)的模型或者傳遞函數(shù), 通過引入某種控制器
9、, 使該系統(tǒng)的閉環(huán)極點(diǎn)能夠移動(dòng)到指定的位置,從而改善系統(tǒng)的動(dòng)態(tài)性能。不同性質(zhì)的負(fù)載時(shí)控制框圖不同4對(duì)于雙環(huán)控制系統(tǒng)應(yīng)從其內(nèi)環(huán)開始進(jìn)行參數(shù)設(shè)計(jì)。 內(nèi)環(huán)電流環(huán)控制的主要目的是使系統(tǒng)具有良好的穩(wěn)定性, 并且具有較快的動(dòng)態(tài)響應(yīng)。 忽略并網(wǎng)電流, 采用7瞬時(shí)電壓電流雙環(huán)控制的SPWM 并網(wǎng)逆變器電流內(nèi)環(huán)的結(jié)構(gòu)如下圖所示:未加入校正環(huán)節(jié)前的開環(huán)傳函為:K pwmG (s)(sL R)(TI s 1)(Tpwm s 1)開關(guān)管等效一階慣性環(huán)節(jié)為:1, K PWM 表示橋路等效增益, TI 為電Tpwms1流采樣時(shí)間常數(shù)。 由于 SPWM 開關(guān)頻率較高, Tpwm 很小,因此可以將其忽略。開環(huán)傳遞函數(shù)可以等效
10、為:G(s)K pwm(sLR)(1.5TI s1)電流環(huán)的作用是提高逆變器的動(dòng)態(tài)響應(yīng),并具有限制輸出電流的能力, 提高系統(tǒng)的可靠性,采用PI 調(diào)節(jié)器。K 2I2 s 1G2 (s) K 2 pK 2 ps2電流環(huán)的開環(huán)傳遞函數(shù)為:Woi (s) K2s1K pwm12 p1.5TI s1 sLR2 sK 2 p K pwm1 s12s(1.5TI s 1)( sLR)8按照型系統(tǒng)設(shè)計(jì)電流內(nèi)環(huán)調(diào)節(jié)器。 當(dāng)cLR 時(shí)(c 為電流環(huán)截止頻率),可令:11 R1sLR( L R)s1Ls則:K2 p K pwm2s1K2 s1Woi (s)L 22s 1)2(1.5TIs 1)s (1.5TIs對(duì)于
11、典型系統(tǒng),可設(shè)計(jì)適當(dāng)?shù)闹蓄l帶寬 h。 中頻寬是衡量二型系統(tǒng)性能指標(biāo)的一個(gè)非常重要的參數(shù)。 為了使系統(tǒng)有良好的動(dòng)態(tài)性能, 希望系統(tǒng)的幅頻特型曲線以 -20d B/dec 穿過 0d B 線。中頻寬 h 表示了二型系統(tǒng)的幅頻特性曲線以 -20d B 斜率下降的寬度,其值為:h21.5TI工程上常取 h=5。根據(jù)“震蕩指標(biāo)法”,對(duì)于二型系統(tǒng),在 h 的值一定的情況下,只有一個(gè)確定的參數(shù) K,使得其閉環(huán)參數(shù)的幅頻特性為最小峰值, 其表達(dá)式為:K2 p K pwmh 1KL 22 22可求得:K2 p6L15TI K pwmK6L2 I2I K pwm112.5T為了保證電流環(huán)能夠?qū)χC波進(jìn)行較好的抑制,
12、 電流環(huán)的開環(huán)轉(zhuǎn)折頻率應(yīng)小于 SPWM 開關(guān)頻率的 1/5 ,并且對(duì)基波有較大的增益,轉(zhuǎn)折頻率要大于基波頻率的10倍。閉環(huán)傳遞函數(shù)中分母中的高次項(xiàng)的系數(shù)Ts 很小,為了便于電壓外環(huán)參數(shù)設(shè)計(jì),在此將其忽略不計(jì),帶入?yún)?shù)后,電流環(huán)的閉環(huán)傳遞函數(shù)可以化簡(jiǎn)為:Wci (s)13TI s19對(duì)電壓外環(huán)校正的主要目的是使系統(tǒng)在低頻段有較高增益, 以減小系統(tǒng)穩(wěn)態(tài)誤差,并且能夠抑制擾動(dòng),因此采用比例積分控制器進(jìn)行校正。 將電流環(huán)化簡(jiǎn)后,電壓環(huán)的結(jié)構(gòu)如下圖所示:其開環(huán)傳遞函數(shù)為:Wov (s)K1 P sK1ICs2 (TV s1)(3TI s 1)式中 TV為電壓采樣時(shí)間常數(shù),K1P , K1I 分別為 PI
13、 調(diào)節(jié)器的比例和積分參數(shù)。 這里設(shè)電壓采樣頻率與電流采樣頻率相同,考慮到電壓采樣的慣性時(shí)間TV和電流環(huán)等效慣性環(huán)節(jié)的時(shí)間常數(shù)都很小, 因此電壓外環(huán)開環(huán)傳遞函數(shù)可以化簡(jiǎn)為:K1P sK1IWov (s)Cs2 (4TI s 1)比照典型二型系統(tǒng)傳遞函數(shù):K ( s1)Wov (s)1)s2 (Ts對(duì)應(yīng)有:KK1I ;K1P ;T 4TIC K1I中頻寬度越寬 h,系統(tǒng)的超調(diào)量越小,但是其動(dòng)態(tài)降落、回復(fù)時(shí)間等動(dòng)T態(tài)抗干擾性能降低。一般工程設(shè)計(jì)時(shí)取折中值,即h=5。據(jù)“震蕩指標(biāo)法”,對(duì)于二型系統(tǒng),在h 的值一定的情況下,只有一個(gè)確定的參數(shù)K,使得其閉環(huán)參數(shù)的幅頻特性為最小峰值,其表達(dá)式為:10Kh1
14、2h2T 2最終可求得:K1P0.6C ; K1I0.12C4TI16TI2最終形成控制框圖:文獻(xiàn) 5濾波器參數(shù)設(shè)計(jì)LC 濾波器的截止頻率為:112.3 LCL濾波器濾波器數(shù)學(xué)模型7這里選擇 L1 電感電流,電容 C2電壓以及并網(wǎng)電感L2 上的電流為狀態(tài)變量,在三相平衡的情況下列出A、B、C 三相的狀態(tài)方程為 :則 dq 坐標(biāo)下的數(shù)學(xué)模型為:12所示的LCL 濾波器的在dq 坐標(biāo)系下的數(shù)學(xué)模型。 旋轉(zhuǎn) 3/2 變換在系統(tǒng)的13d 軸和 q 軸之間引入了強(qiáng)耦合, d、q 軸電流除受控制量 ud 和 uq 影響外,還受耦合電壓 L1iq 、L2 iq 、 L1id 、L2id 和耦合電流 C 2u
15、cq、 C 2ucd以及電網(wǎng)電壓 usd 、usq 的影響。如果不對(duì) d 軸和 q 軸進(jìn)行解耦控制,采用電流閉環(huán)控制時(shí) d 軸和 q 軸的電流指令跟蹤效果不是很理想。根據(jù)圖所示的系統(tǒng)拓?fù)浣Y(jié)構(gòu)圖可以推得并網(wǎng)輸出電流 I2 同逆變橋輸出 Uk 以及電網(wǎng)電壓 Us 的控制結(jié)構(gòu)框圖如下:根據(jù)圖所示的濾波器控制結(jié)構(gòu)圖,可以推導(dǎo)出并網(wǎng)電流 I2 與逆變橋輸出 Uk 之間的傳遞函數(shù)為:由公式可見,這是一個(gè)雙輸入, 單輸出的三階線性系統(tǒng), 選取濾波電感 L1,并網(wǎng)電感 L2 電流以及濾波電容電壓 Uc 為狀態(tài)變量 ,Us 作為系統(tǒng)的輸入, 其中將 Us 作為系統(tǒng)的一個(gè)擾動(dòng)輸入量。 將 Us 當(dāng)成擾動(dòng)輸入時(shí),可
16、以得到并網(wǎng)電流 I2 與逆變橋輸出電壓 Uk 之間的傳遞函數(shù)為:將逆變橋輸出 Uk 當(dāng)成擾動(dòng)輸入時(shí),可以得到并網(wǎng)電流I2 與電網(wǎng)電壓 Us 之間的傳遞函數(shù)為:14控制器設(shè)計(jì) 8-9采用并網(wǎng)電流i2 單環(huán)控制,其控制框圖如圖,其傳遞函數(shù)如式:使用 MATLAB 作出基于并網(wǎng)電流 i2 單環(huán)的閉環(huán)根軌跡圖。 從圖中看出, 基于并網(wǎng)電流 i2 單環(huán)控制的根軌跡大部分都分布在右半平面,只有一小部分分布在左半平面, 當(dāng)系統(tǒng)增益增大時(shí), 很容易就會(huì)造成系統(tǒng)的不穩(wěn)定。 這種不穩(wěn)定是由于 LCL 型濾波器的諧振峰造成的,要使得系統(tǒng)穩(wěn)定,必須對(duì)諧振峰進(jìn)行抑制抑制 LCL 型濾波器諧振峰的方法主要分為無源阻尼和有
17、源阻尼兩種。通過在電容通路中引入阻尼電阻Rd 來抑制諧振峰為無源阻尼; 通過控制算法引入新的反饋量來達(dá)到抑制諧振峰為有源阻尼。采用無源阻尼的系統(tǒng)框圖如圖所示,忽略比例積分控制器中的積分環(huán)節(jié),其傳遞函數(shù)為:15Figure 2-3 帶無源阻尼的基于并網(wǎng)電流i2 單環(huán)控制框圖在電容回路加入阻尼電阻后,基于并網(wǎng)電流i2 單閉環(huán)的閉環(huán)極點(diǎn)在左半平面的分布要明顯多于未引入阻尼電阻時(shí)的情況。當(dāng)系統(tǒng)增益Kp 配置的合適時(shí),開環(huán)極點(diǎn)位于左半平面,系統(tǒng)能夠穩(wěn)定工作。但無源阻尼還存在著一些缺點(diǎn), 當(dāng)逆變器的電壓或功率等級(jí)較高時(shí), 阻尼電阻會(huì)嚴(yán)重增加系統(tǒng)損耗, 影響系統(tǒng)效率, 需要強(qiáng)制冷卻。 而有源阻尼則不存在這些
18、缺點(diǎn),有源阻尼是通過控制算法消除系統(tǒng)的諧振峰, 不會(huì)增加系統(tǒng)損耗, 典型的方法是采用并網(wǎng)電流 i2 外環(huán)電容電流 ic 內(nèi)環(huán)雙環(huán)控制法, 其控制框圖如圖:Figure 2-4 基于并網(wǎng)電流i2 外環(huán)電容電流ic 內(nèi)環(huán)雙環(huán)控制策略可以推導(dǎo)出基于并網(wǎng)電流i2 外環(huán)電容電流ic 內(nèi)環(huán)雙環(huán)控制的傳遞函數(shù)如:選擇合適的外環(huán)比例節(jié)分系數(shù)和內(nèi)環(huán)比例參數(shù)、 主電路參數(shù)一起代入到式中,得到其閉環(huán)根軌跡。 從根軌跡可知, 基于雙電流環(huán)控制的三相 LCL 型濾波器的根軌跡有一大部分分布在左半平面, 系統(tǒng)具有一定的相位裕度。 在合理選擇控制器參數(shù)的情況下,基于雙電流環(huán)的控制策略能夠使系統(tǒng)穩(wěn)定。16濾波器參數(shù)設(shè)計(jì)在設(shè)計(jì)
19、濾波器時(shí)要考慮的因素較多,給設(shè)計(jì)帶來了一定的難度, 因此在設(shè)計(jì)時(shí)嚴(yán)格按以下要求:(1)電容無功功率最大不能超過額定功率的10%;電容 C 的作用是濾除高頻分量,即保證電流的高頻分量從電容上流過而不流入電網(wǎng),因此,一般要求電容的阻抗不能太大,一般取 :其中 Xc 、X L2 分別為電容C 和電感 L2 在開關(guān)頻率下的阻抗。如果電容取值太小,將導(dǎo)致 Xc 過大,會(huì)導(dǎo)致更多的諧波電流注入電網(wǎng),使得并網(wǎng)電流畸變;而電容取值過大,則導(dǎo)致 Xc 過小,電容將產(chǎn)生過多的無功電流,使整個(gè)系統(tǒng)的效率降低。因此,為了提高逆變器的效率,使系統(tǒng)的功率因數(shù)接近為1,通常規(guī)定濾波電容的基波無功功率在系統(tǒng)額定有功功率的5%以內(nèi),即 :(2)電感電壓必須小于限制值的10%;(3)諧振頻率應(yīng)該大于10 倍的電壓頻率,小于0.5 倍的開關(guān)頻率,防止逆變器在工作頻率發(fā)生諧振;將電網(wǎng)電壓 v2 短路,可以得到并網(wǎng)電流i2 對(duì)逆變器側(cè)電壓v1 的轉(zhuǎn)移阻抗17為 :同理可得,將逆變器側(cè)電壓 v1 短路,可以得到并網(wǎng)電流 i2 對(duì)電網(wǎng)電壓 v2 的阻抗為 :從計(jì)算結(jié)果可得, LCL 型濾波器的傳遞函數(shù)存在兩個(gè)諧振峰
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請(qǐng)下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請(qǐng)聯(lián)系上傳者。文件的所有權(quán)益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網(wǎng)頁內(nèi)容里面會(huì)有圖紙預(yù)覽,若沒有圖紙預(yù)覽就沒有圖紙。
- 4. 未經(jīng)權(quán)益所有人同意不得將文件中的內(nèi)容挪作商業(yè)或盈利用途。
- 5. 人人文庫網(wǎng)僅提供信息存儲(chǔ)空間,僅對(duì)用戶上傳內(nèi)容的表現(xiàn)方式做保護(hù)處理,對(duì)用戶上傳分享的文檔內(nèi)容本身不做任何修改或編輯,并不能對(duì)任何下載內(nèi)容負(fù)責(zé)。
- 6. 下載文件中如有侵權(quán)或不適當(dāng)內(nèi)容,請(qǐng)與我們聯(lián)系,我們立即糾正。
- 7. 本站不保證下載資源的準(zhǔn)確性、安全性和完整性, 同時(shí)也不承擔(dān)用戶因使用這些下載資源對(duì)自己和他人造成任何形式的傷害或損失。
最新文檔
- 石樓縣2025年數(shù)學(xué)四下期末監(jiān)測(cè)試題含解析
- 江蘇省宿遷市泗洪縣2025屆四年級(jí)數(shù)學(xué)第二學(xué)期期末聯(lián)考試題含解析
- 江蘇省常州市武進(jìn)區(qū)禮嘉中學(xué)2025屆高三5月模擬(三模)語文試題含解析
- 酒泉市金塔縣2025年數(shù)學(xué)三下期末聯(lián)考模擬試題含解析
- 個(gè)人購房合同樣本
- 智慧農(nóng)業(yè)技術(shù)-提升農(nóng)村人居環(huán)境質(zhì)量
- 大型超市收銀員勞動(dòng)合同書
- 遼寧省遼陽市燈塔市2019-2020學(xué)年八年級(jí)上學(xué)期期末物理試題【含答案】
- 勞動(dòng)合同續(xù)簽意向協(xié)議書范本
- 個(gè)人產(chǎn)品分銷合同
- 聲帶息肉課件教學(xué)課件
- 2024年考研政治復(fù)習(xí)要點(diǎn)解析
- Profinet(S523-FANUC)發(fā)那科通訊設(shè)置
- 2024至2030年中國(guó)尼龍66切片數(shù)據(jù)監(jiān)測(cè)研究報(bào)告
- 人工智能概論課件完整版
- 《早產(chǎn)兒第一年:從NICU到家庭照護(hù)完全指南》隨筆
- 四川省成都市2024年小升初英語試卷(含答案)
- 2024自動(dòng)導(dǎo)引車AGV技術(shù)規(guī)范
- (完整版)柴油發(fā)電機(jī)施工方案
- 醫(yī)院培訓(xùn)課件:《血管超聲在通路中的應(yīng)用》
- 2024年職業(yè)技能測(cè)試題庫500道附答案【黃金題型】
評(píng)論
0/150
提交評(píng)論