



版權說明:本文檔由用戶提供并上傳,收益歸屬內容提供方,若內容存在侵權,請進行舉報或認領
文檔簡介
1、基于極點配置算法的列車橫向半主動懸掛自適應PID控制系統設計基金項目:國家自然科學基金重點項目(61134002)作者簡介:金光大(1986-),男,碩士研究生,主要研究方向:電氣系統控制及信息技術 金煒東(1959-),男,教授,博士生導師,主要研究方向:智能信息處理,系統仿真,滿意優化控制等 李明(1986-),男,碩士研究生,主要研究方向:電氣工程及其自動化金光大 金煒東 李明(西南交通大學 電氣工程學院,四川 成都 610031)摘要:為了使PID控制器具備自適應能力,以適應列車受到外部環境擾動時產生的結構參數變化,使用了增量式數字PID控制器,將PID控制器與極點配置控制算法結合,利
2、用極點配置算法在線實時優化,參數,設計了自適應極點配置PID控制器,實現了,參數的自動校正。最后給出基于極點配置自適應PID的高速列車半主動懸掛控制系統的設計方案,利用MATLAB-Simulink搭建仿真平臺,進行了仿真。關鍵詞:自適應;PID;懸掛系統;控制中圖分類號:TP29 文獻標識碼:AVehicle Lateral Semi-active Suspension Control System Design Based on Pole Placement Algorithm Adaptive PID ControllerJinGuangda JinWeidong Liming(Scho
3、ol of Electrical Engineering, Southwest Jiaotong University, Chengdu 610031, China)Abstract: In order to make the PID controller to have the ability of the adaptation , adapting the changing of structural parameters which was changed when the train was interfered by the external environment , the in
4、cremental digital PID controller was used . The PID controller and the pole placement algorithm was combined to optimize the , and parameters online . The adaptive PID controller was designed . The , and parameters could be atuomatically corrected . The semi-active suspension control system of the h
5、igh-speed trains based on the pole placement algorithm adaptive PID controller was given at last . The simulation was carried out by using MATLAB-Simulink .Key words: adaptive ; PID ; suspension system ; control0 引言列車在國內及國外均是人員出行和貨物運輸的非常重要且不可或缺的交通工具,正由于列車的廣泛應用性,對列車運行的穩定性和舒適性提出了較高的要求,而橫向振動正是這一問題的關建所在
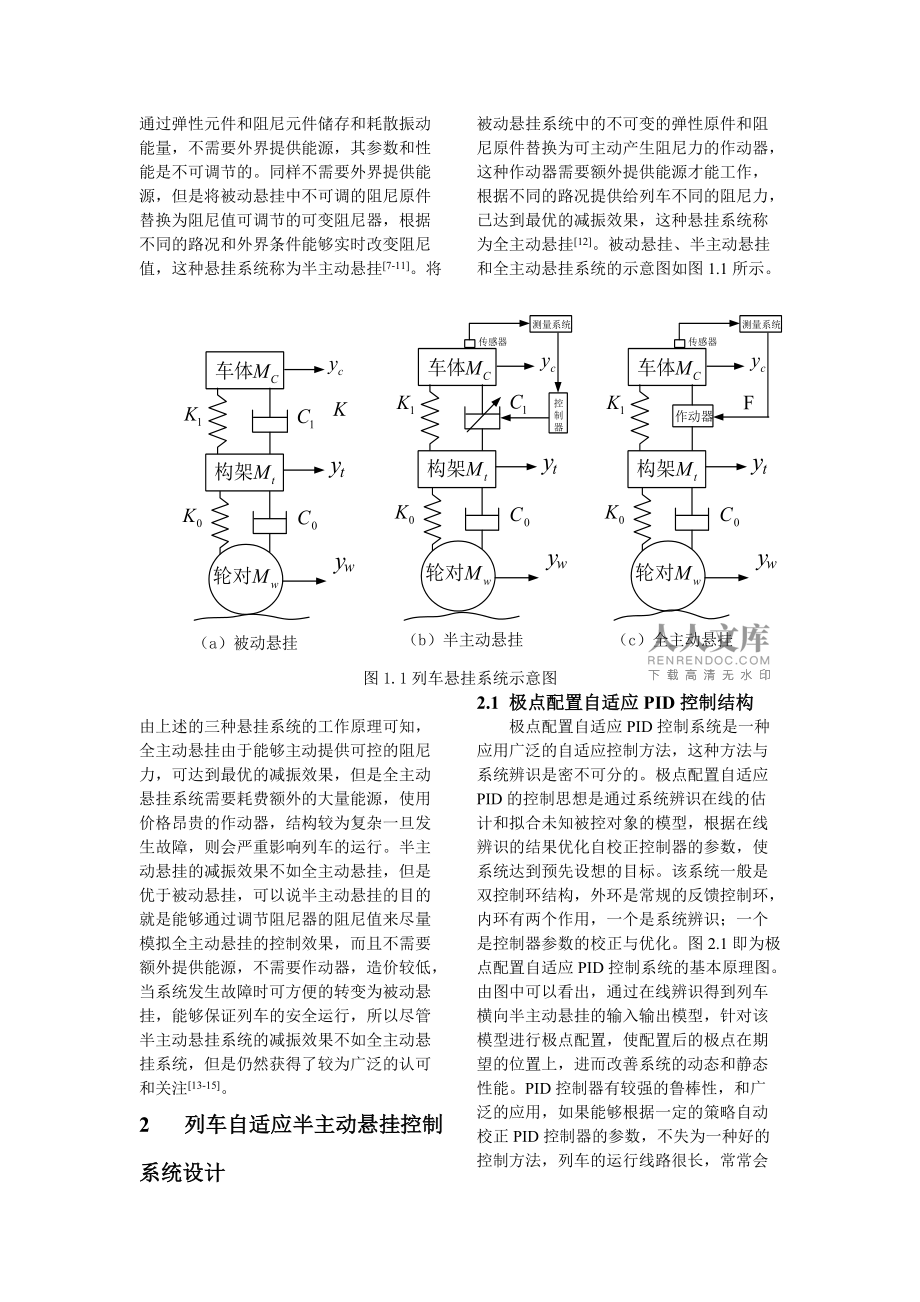
6、1,2。在列車的運行中橫向振動幅值的大小與軌道不平順,牽引力和制動力都有著直接和間接的關系,克服和減小列車的多自由度隨機振動一直以來是一個備受關注的問題2,3,4。隨著我國鐵路運輸的發展,列車逐步提高運行速度,這個問題變得更加重要,懸掛系統正是解決該問題的設備與裝置。懸掛系統是一系列裝置的組合體,包括輪對與構架,構架與車體之間多個彈性元件和阻尼元件,起到減小振動的作用5,6。1 列車半主動懸掛系統的提出列車的懸掛系統分為被動懸掛,半主動懸掛和全主動懸掛,其中被動懸掛系統通過彈性元件和阻尼元件儲存和耗散振動能量,不需要外界提供能源,其參數和性能是不可調節的。同樣不需要外界提供能源,但是將被動懸掛
7、中不可調的阻尼原件替換為阻尼值可調節的可變阻尼器,根據不同的路況和外界條件能夠實時改變阻尼值,這種懸掛系統稱為半主動懸掛7-11。將被動懸掛系統中的不可變的彈性原件和阻尼原件替換為可主動產生阻尼力的作動器,這種作動器需要額外提供能源才能工作,根據不同的路況提供給列車不同的阻尼力,已達到最優的減振效果,這種懸掛系統稱為全主動懸掛12。被動懸掛、半主動懸掛和全主動懸掛系統的示意圖如圖1.1所示。圖1.1列車懸掛系統示意圖由上述的三種懸掛系統的工作原理可知,全主動懸掛由于能夠主動提供可控的阻尼力,可達到最優的減振效果,但是全主動懸掛系統需要耗費額外的大量能源,使用價格昂貴的作動器,結構較為復雜一旦發
8、生故障,則會嚴重影響列車的運行。半主動懸掛的減振效果不如全主動懸掛,但是優于被動懸掛,可以說半主動懸掛的目的就是能夠通過調節阻尼器的阻尼值來盡量模擬全主動懸掛的控制效果,而且不需要額外提供能源,不需要作動器,造價較低,當系統發生故障時可方便的轉變為被動懸掛,能夠保證列車的安全運行,所以盡管半主動懸掛系統的減振效果不如全主動懸掛系統,但是仍然獲得了較為廣泛的認可和關注13-15。2 列車自適應半主動懸掛控制系統設計2.1 極點配置自適應PID控制結構極點配置自適應PID控制系統是一種應用廣泛的自適應控制方法,這種方法與系統辨識是密不可分的。極點配置自適應PID的控制思想是通過系統辨識在線的估計和
9、擬合未知被控對象的模型,根據在線辨識的結果優化自校正控制器的參數,使系統達到預先設想的目標。該系統一般是雙控制環結構,外環是常規的反饋控制環,內環有兩個作用,一個是系統辨識;一個是控制器參數的校正與優化。圖2.1即為極點配置自適應PID控制系統的基本原理圖。由圖中可以看出,通過在線辨識得到列車橫向半主動懸掛的輸入輸出模型,針對該模型進行極點配置,使配置后的極點在期望的位置上,進而改善系統的動態和靜態性能。PID控制器有較強的魯棒性,和廣泛的應用,如果能夠根據一定的策略自動校正PID控制器的參數,不失為一種好的控制方法,列車的運行線路很長,常常會遇到不同的擾動和路況,單一不變的PID參數,不能使
10、列車在任何路況下都運行在最優狀態下,所以需要根據不同的擾動和路況對PID參數進行實時調節,才能取得較好的控制效果。17自由度列車模型辨識PID參數計算器擾動可調參數PID控制器+-圖2.1極點配置自適應PID控制結構圖2.2 極點配置的實現使用在自適應控制中應用較為廣泛的CARMA(Controller Auto-Regressive Integrated Moving Average)模型: (1)其中為延遲算子,先使用增廣遞推最小二乘法對CARMA模型中的未知參數進行辨識,再將系統的反饋控制律設計為: (2)式中 (3) (4)將式(2)代入式(1),整理得: (5)可見,通過在線辨識得到
11、的系統輸入輸出模型的特征多項式為: (6)設系統期望的特征多項式為: (7)其中 (8)式(8)中,為相應的穩定極點,本文中考慮到最佳二階工程參數,將期望的閉環系統設計為自然振蕩頻率為和阻尼系數的二階系統,超調量約為4.3%,調整時間約為0.42 s(),其閉環特征多項式為: (9)對式(9)使用反向差分進行離散化,這里的延遲算子和離散時間系統常用的是具有同樣意義的,根據拉式變換和變換的關系有:,為采樣周期,再將展開為無窮級數得: (10)對式(10)取一階近似得:則有: (11)將式(11)代入式(9),并取得式(9)的離散化為: (12)由式(12)可知期望的閉環極點為:為了實現極點配置,
12、就要使系統的特征多項式與期望的特征多項式相等,綜合式(6)、(7)和(12)得: (13)式(13)的解法與丟番圖方程的解法是類似的,通過令等號兩邊同次冪的項系數相等即可確定和中的未知系數,為了保證式(13)有解,需要使與階次相等,的階次小于或等于和的階次,即 (14)把式(13)代入式(5)整理簡化,即可得到系統經過極點配置后的閉環方程: (15)由式(15)可見,系統的特征多項式為期望的特征多項式2.3 PID參數的優化首先介紹一下本文所使用的增量式PID控制器增量式PID算法如式(16)所示: (16)其中、和分別為比例,積分和微分參數,并且 (17)對式(16)進行化簡整理,式(16)
13、可以表示為: (18)其中 (19)用作為單位延時算子,則對式(18)進行進一步整理,可得: (20)式(20)可表示為 (21)其中 (22)考慮到在列車橫向半主動懸掛控制系統中,參考輸入總是0,則式(21)可寫為: (23)將式(23)代入式(1)中,整理得: (24)由式(24)可見系統的特征多項式為: (25)比較式(25)與式(6)可知,使用增量式PID控制器與使用自適應極點配置控制器的特征多項式恰好是相同的,因此可以同樣使用極點配置的方法使得PID控制器中的、和參數實現在線自我校正,自動尋優,仍然使用式(7),(12)和(13)來實現自適應PID控制器的極點配置,由式(7),(12
14、)和(13)確定了中的未知參數、和后,為了獲得在線優化后的PID參數,需要解式(19)這個線性方程組,由式(19)本身可知,解該線性方程組顯然是非常簡單的,完全不會影響控制系統的實時性,最后把解得的、和參數賦給參數可變的PID控制器,即實現了自校正PID控制,3 基于Simulink的列車半主動懸掛自適應PID控制系統仿真采用Simulink對車輛半主動懸掛系統進行數字仿真,如圖3.1所示圖3.1基于simulink的車輛半主動懸掛系統仿真車體的橫向振動情況可由振動加速度時域圖比較直觀的反映出來,如圖3.2所示。圖中把半主動懸掛與被動懸掛的車體橫向振動加速度進行了對比,通過該時域圖可以對某一時
15、刻車體在被動和半主動懸掛兩種不同懸掛方式下的橫向振動幅值進行觀察,可以看出相對于被動懸掛,自適應控制取得了一定的控制效果,與被動懸掛相比較車體橫向加速度的時域幅值有所下降。圖3.2車體橫向振動加速度時域圖圖3.3為功率譜圖,從功率譜圖中可以看出相對于被動懸掛,半主動懸掛自適應控制的車體橫向振動加速度在頻率低于10Hz的低頻帶得到了一定程度的控制,尤其在人體能明顯感知振動的頻帶0.73.5HZ改善效果較為明顯圖3.3車體橫向振動加速度功率譜圖圖3.4為頻域圖,通過頻域分析可以看出列車車體的橫向振動加速度主要集中在低頻段0.510HZ左右,相對于被動懸掛,半主動懸掛自適應控制的車體橫向加速度的頻域
16、幅值均有所下降圖4車體橫向振動加速度頻譜圖相比于被動懸掛系統,基于極點配置自適應PID的半主動懸掛控制系統的車體橫向加速度有較大減小,其最大值由0.4876m/s2降低到0.3124m/s2,改善35.9%,其均方根由0.3764m/s2下降到0.2781m/s2改善26.13%。4 結語通過仿真分析可知,將自適應控制理論與方法應用于列車的半主動懸掛控制是可行的,自適應控制方法取得了較好的控制效果,基于極點配置的自適應PID控制器與傳統的PID控制器較為為相似,但是其與傳統的PID控制器相比可以自動校正比例、積分和微分三種參數,適應性更強,并且繼承了傳統PID控制器的魯棒性,具有較強的可應用性
17、。參考文獻1 岳三玲,卜繼玲等. 基于Simulink的車輛動力學仿真模型研究J. 機械設計制造與自動化,2010,24(1):231-2362 郁家杰基于DMC的車輛橫向半主動 懸掛控制D成都:西南交通大學, 2010,4-273 D. Karnopp,M. J. Crosby and R. A. Harwood. Vibration Control using Semi-Active Force GeneratorJ. ASME Journal of Engineering of Industry,2004,103(4):619-6124G. N. Sarma,F. Kozin. An A
18、ctive Suspension system Design for the Lateral Dynamic of a High-Speed Wheel-rail SystemJ. Journal of Dynamic Systems, Measurement and Control. 1971,86(4):233-2415P. K. Sinha,D. N. Wormley,J. K. Hedrik. Rail Passenger Vehicle Lateral Dynamic Performance Improvement Through active controlJ. Transacti
19、on of ASME,1998,100(3): 271-283.6 Goodall R M. Active controls in Ground Transportation-a Review of the State-the-art and Future PotentialJ. Vehicle system dynamic,2003,78(12): 225-257.7 Mortland K, Hedrick J K. Dynamic Performance Improvement Through Active controlJ. Transaction of ASME, 2011, 126(
20、2):109-111.8 G W Celiniker, J K Hedrick. Rail Vehicle Active Suspensions for Lateral Rail and stability ImprovementJ. Transaction of the ASME,2007, 104(7):100-106.9 Goodall R M. Active controls in Ground Transportation- a Review of the State-the-art and Future PotentialJ. Vehicle system dynamic, 198
21、3,88(12): 225-257.10 Goodall E M. Active Railway Suspension: Implementation Status and Technological TrendsJ. Vehicle System Dynamics, 1998,134(12):87-117.11 Thompson, A. G. An Active Suspension with Optimal Linear State FeedbackJ, Vehicle System Dynamics, 2009,95(5):187-203.12J .K. Hedrick. Railway Vehicle Activ
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯系上傳者。文件的所有權益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網頁內容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經權益所有人同意不得將文件中的內容挪作商業或盈利用途。
- 5. 人人文庫網僅提供信息存儲空間,僅對用戶上傳內容的表現方式做保護處理,對用戶上傳分享的文檔內容本身不做任何修改或編輯,并不能對任何下載內容負責。
- 6. 下載文件中如有侵權或不適當內容,請與我們聯系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 2024年防殺病毒軟件項目資金需求報告代可行性研究報告
- 2025綠色蔬菜購銷合同
- 2025合同法合同履行與違約責任的相關法律規定
- 2025個人的借款簡單合同范本
- 2024年聚烯烴類線纜投資申請報告代可行性研究報告
- 2024年粉末橡膠聚硫橡膠項目資金籌措計劃書代可行性研究報告
- 2025大慶市建筑工程施工設備采購合同(試行)
- 2025年新版勞動合同全面實施
- 2025寫字樓租賃合同模板2
- 2025年食品銷售合同模板
- 2025-2030中國機電安裝工程行業市場現狀供需分析及市場深度研究發展前景及規劃可行性分析研究報告
- 2025年高考歷史總復習高中歷史必修二八大專題知識復習提綱
- 2025事業單位考試題庫及答案200題
- 臨床執業醫師考試健康教育技能試題及答案
- 常見內科疾病護理要點試題及答案
- 機車車輛試題及答案
- 地理澳大利亞課件-2024-2025學年人教版(2024)初中地理七年級下冊
- 2025-2030中國冷軋鋼板行業市場發展現狀及發展趨勢與投資前景研究報告
- 礦山雨季生產安全知識培訓
- 常用施工規定和技術要求1
- 數學-湖南省2025屆高三下學期“一起考”大聯考(模擬二)試題+答案
評論
0/150
提交評論