



版權說明:本文檔由用戶提供并上傳,收益歸屬內容提供方,若內容存在侵權,請進行舉報或認領
文檔簡介
1、肇慶市技師學院ABBa/-J-3ABB 機器人的手動操作3.1 任務目標Ø 掌握手動操作機器人運動的三種模式。Ø 使用“增量”模式來控制機器人的運動。Ø 熟練使用手動操縱的快捷方式。Ø 掌握 ABB 機器人轉數計數器更新操作。3.2 任務描述手動操縱機器人運動一共有三種模式:單軸運動、線性運動和重定位運動。如何使用這三種模式手動 操作機器人運動是項目的主要內容。建立一個工作站,ABB 型號為 IRB120,Y 軸上建模長方體,長 200mm,寬 200mm,高 400mm,在長方 體的內角上進行重定位運動,之后恢復到機械遠點。(手動操作練習需要教師指導,
2、同時需要上機練習)3.3 知識儲備3.3.1 手動操作三種模式1.單軸運動一般地,ABB 機器人是由六個伺服電動機分別驅動機器人的六個關節軸,那么每次手動操縱一個關節軸 的運動,就稱之為單軸運動。2.線性運動圖 2IRB 120 機器人的關節軸機器人的線性運動是指安裝在機器人第六軸法蘭盤上工具的 TCP 在空間中作線性運動。3.重定位運動機器人的重定位運動是指機器人第六軸法蘭盤上的工具 TCP 點在空間中繞著坐標軸旋轉的運動,也可 以理解為機器人繞著工具 TCP 點作姿態調整的運動。3.3.2RobotStudio 中的建模功能當使用 RobotStudio 進行機器人的仿真驗證時,如節拍、到
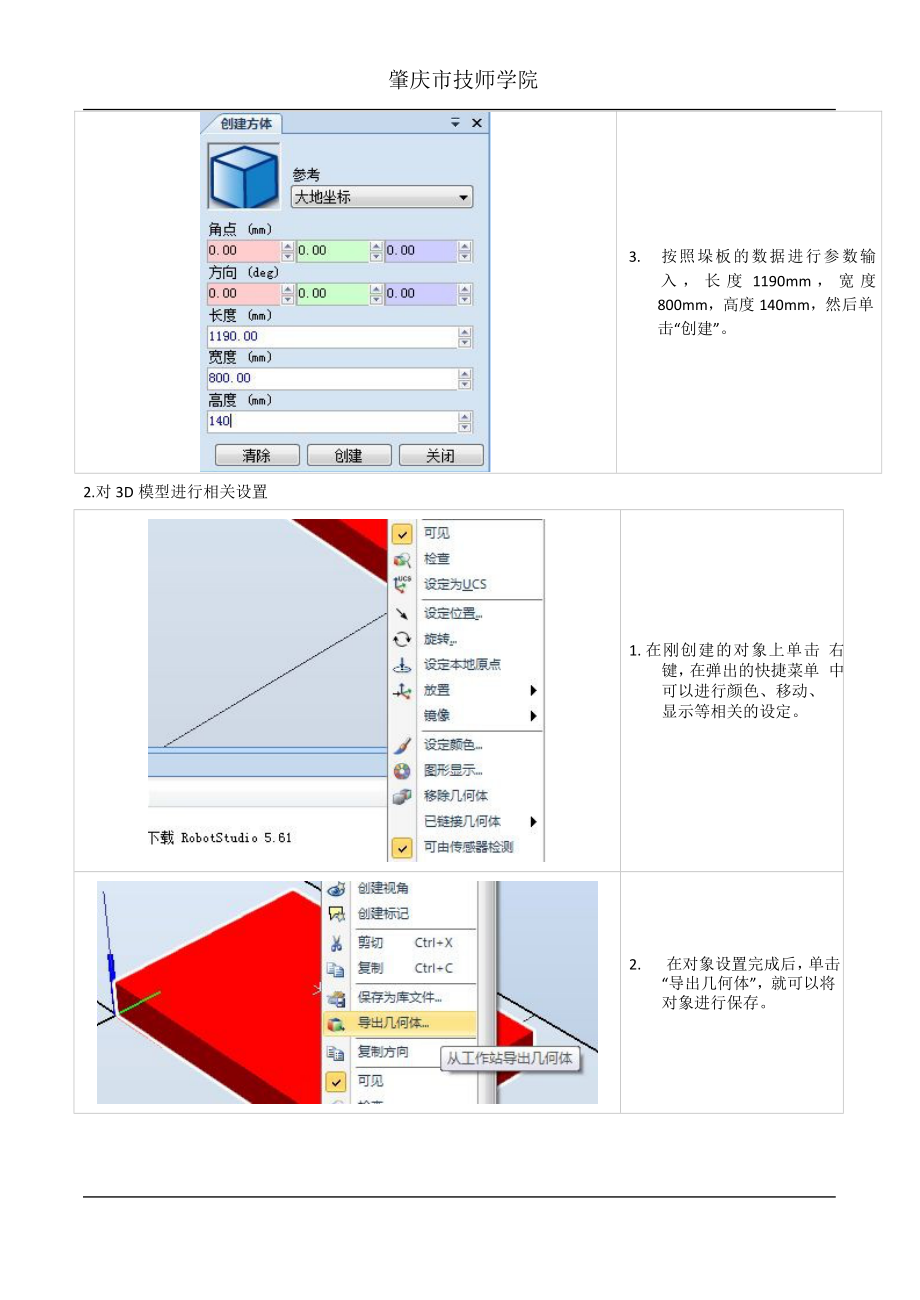
3、達能力等,如果對周邊模型要求不是非常細 致的表述時,可以用簡單的等同實際大小的基本模型進行代替,從而節約仿真驗證的時間。如果需要精細的 3D 模型,可以通過第三方的建模軟件進行建模,并通過*.sat 格式導入到 RobotStudio中來完成建模布局的工作。1.使用 RobotStudio 建模功能進行 3D 模型的創建1.單擊“新建”菜單命令組,創建 一個新的空工作站。2. 在“建模”功能選項卡中,單擊 “創建”組中的“固體”菜單,選擇 “矩形體”。肇慶市技師學院3.按照垛板的數據進行參 數輸入 , 長 度 1190mm , 寬 度800mm,高度 140mm,然后單 擊“創建”。2.對 3
4、D 模型進行相關設置1. 在剛創建的對象上單擊 右鍵,在彈出的快捷菜單 中可以進行顏色、移動、 顯示等相關的設定。2. 在對象設置完成后,單擊 “導出幾何體”,就可以將 對象進行保存。3.4 任務實施3.4.1 單軸運動的手動操縱電源總開關 急停開關通電復位 機器人狀態1. 將 控 制 柜 上 機 器 人 狀 態 鑰 匙 切 換 到 中 間 的 手動限速狀態。2.在狀態欄中,確認 機 器 人 的 狀 態已切換為“手 動”。3.ABB 菜單中,選 擇“手動操縱”。4.單 擊 “ 動 作 模 式”。5.選中“軸 1-3”,然 后 單 擊 “ 確 定 ”(選中“軸 4-6”, 就 可 以 操 縱 軸
5、4-6)。6.用 左 手 按 下 使能按鈕,進入“電 動機開啟”狀態,在狀態欄中,確認“電動機開啟”狀態。7.此 處 顯 示 “ 軸1-3”的操縱桿方 向。黃箭頭代表 正方向。*操縱桿的使用 技巧:可以將機器人 的操縱桿比作汽車 的節氣門,操縱桿的 操縱幅度是與機器人的運動速度相關 的。操縱幅度較小, 則機器人運動速度 較慢。操縱幅度較大, 則機器人運動速度 較快。所以在操作時, 盡量以小幅度操縱 使機器人慢慢運動。3.4.2 線性運動1.“手動操縱”-“動作模式” 界 面 中 選 擇 “線性”,然 后 單 擊 “ 確 定”。2.單擊“工具 坐標”。*機器人的線性 運動要在“工具 坐標”中指定
6、對 應的工具。肇慶市技師學院3. 選 中 對 應 的工具(工 具 數 據 的 建立,參見 程 序 數 據 內容)。4.用 左 手 按下 使 能 按 鈕,進入“電動 機開 啟 ”狀態,在狀 態欄中,確認“ 電 動機 開啟”狀態。5. 此 處 顯 示 軸 X、Y、Z 的 操 縱 桿 方向。黃箭 頭 代 表 正 方向。3.4.3 重定位運動6. 操 作 示 教 器 上 的 操 縱桿,工具 的 TCP 點在 空 間 中 作 線性運動。1.“ 手 動 操縱 ”-“ 動 作 模 式” 界 面 中,選中“重 定位”,然后 單 擊 “ 確 定”。2.單 擊“ 坐 標 系”。3. 選 中 “ 工 具”,然后單
7、擊“確定”。4.單 擊“ 工 具 坐標”。5. 選 中 正 在 使 用 的 工 具,然后單 擊“確定”。6.用 左 手 按下 使 能 按 鈕,進入“電動 機開 啟 ”狀態,在狀 態欄中,確認“ 電 動機 開啟”狀態。7. 此 處 顯 示 X、Y、Z 的 操 縱 桿 方 向。黃箭頭 代 表 正 方 向。3.4.4 增量模式控制機器人運動8. 操 縱 示 教 器 上 的 操 縱桿,機器 人 繞 著 工 具 TCP 點作 姿 態 調 整 的運動。如果對使用操縱桿通過位移幅度來控制機器人運動的速度不熟練的話。那么可以使用“增量”模式來控制機器人的運動。 在增量模式下,操縱桿每位移一次,機器人就移動一步
8、。如果操縱桿持續一秒或數秒鐘,機器人就會持續移動(速率為 10 步/s)。1.“ 手動操縱” 界面中,選中“ 增量”。2.根 據 需 要 選 擇 增 量 的 移 動 距離,然后單擊“確定”。增量移動距離Mm角度°小0.050.005中10.02大50.2用戶自定義自定義3.5 知識鏈接3.5.1 手動操縱的快捷方式1.手動操縱的快捷按鈕標號說明A機器人/外軸的切換B線性運動/重定位運動的切換C關節運動軸 1-3/軸 4-6 的切換D增量開/關A B C D2.手動操縱的快捷菜單1.單擊此快捷菜單按 鈕。2.單擊“ 手動操縱” 按 鈕。3.單擊“ 顯示詳情” 展 開菜單。4.界面說明:
9、標 號說明A選擇當前使用 的工具數據B選擇當前使用 的工件坐標C操縱桿速率D增量開/關E碰撞監控開/關F坐標系選擇G動作模式選擇5. 單擊“ 增量模式” 按 鈕,選擇需要的增 量。6. 自定義增量值的方 法 : 選 擇 “ 用 戶 模 塊”,然后單擊“顯示 值”就可以進行增量 值的自定義了。3.5.2ABB 機器人轉數計數器更新操作ABB 機器人六個關節軸都有一個機械原點的位置。 在以下的情況,需要對機械原點的位置進行轉數計數器的更新操作:1)更換伺服電動機轉數計數器電池后。2)當轉數計數器發生故障,修復后。3)轉數計數器與測量板之間斷開過以后。4)斷電后,機器人關節軸發生了移動。5)當系統報
10、警提示“10036 轉數計數器未更新”時。1. 機 器 人 六 個 關 節 軸 的 機 械 原 點刻度示意圖。提示:使用手動 操縱讓機器人各關 節軸運動到機械原 點刻度位置的順序 是:4-5-6-1-2-3。注意:各個型號的機器人機械原點 刻度位置會有所不 同,請參考 ABB 隨 機光盤說明書。2.在 手 動 操 縱 菜 單中,選擇“軸4-6”動作模式, 將 關 節 4 運 動到 機 械 原 點 的刻度位置。3.在 手 動 操 縱 菜單中,選擇“軸4-6”動作模式, 將 關 節 軸 5 運動 到 機 械 原 點的刻度位置。4.在 手 動 操 縱 菜 單中,選擇“軸4-6”動作模式, 將 關 節
11、 軸 6 運 動 到 機 械 原 點 的刻度位置。5.在 手 動 操 縱 菜單中,選擇“軸1-3”動作模式, 將 關 節 軸 1 運動 到 機 械 原 點的刻度位置。6.在 手 動 操 縱 菜 單中,選擇“軸1-3”動作模式, 將 關 節 軸 2 運動 到 機 械 原 點的刻度位置。7.在 手 動 操 縱 菜 單中,選擇“軸1-3”動作模式, 將 關 節 軸 3 運動 到 原 點 的 刻度位置。8.ABB 菜單中,選 擇“校準”。9.單擊“ROB_1”。10. 選 擇 “ 校 準 參 數”。11. 選擇“編輯電動 機校準偏移”。12. 將 機 器 人 本 體 上 電 動 機 校 準偏 移 記
12、錄 下 來( 位 于 機 器 人 機身)。13. 單擊“是”。14. 輸 入 剛 才 從 機 器 人 本 體 記 錄 的 電 動 機 校 準 偏移數據,然后 單擊“確定”。 如 果 示 教 器 中 顯 示 的 數 據 與 機 器 人 本 體 上 的 標 簽 數 據 一 致 , 則 無 需 修 改 , 直 接 單 擊 “取消”退出, 跳到第 18 步。15. 確定修改后,在 彈 出 的 重 啟 對 話 框 中 單 擊 “是”。16. 重啟后,ABB 菜 單 中 選 擇 “ 校 準”。17. 單擊“ROB_1”。18. 選擇“更新轉數 計數器”。19. 單擊“是”。20. 單擊“全選”, 然 后
13、單 擊 “ 更 新”。(如果機器 人 由 于 安 裝 位 置的關系,無法 六 個 軸 同 時 到 達 機 械 原 點 刻 度位置,則可以 逐 一 對 關 節 軸 進 行 轉 數 計 數 器更新)21. 單擊“更新”。3.5.3RobotStudio 中測量工具的使用1.單擊“選擇部件”。2.單擊“捕捉末端”。3.在“建模”選項卡中,單擊“點 到點”。4.單擊 A 角點。5.單擊 B 角點。6.垛板長度的測量結果就顯示 在這里。(1)測量垛板的長度(2)測量錐體的角度22. 操作完成后,轉 數 計 數 器 更 新 完成。1.在“建模”功能選項卡中,單擊“角度”。2.單擊 A 角點。3.單擊 B 角點。4.單擊 C 角點。5.椎體頂角角度的測量結果就顯 示在這里。(3)測量圓柱體的直徑1.單擊“捕捉邊緣”。2.在“ 建模” 功能選項卡中
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯系上傳者。文件的所有權益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網頁內容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經權益所有人同意不得將文件中的內容挪作商業或盈利用途。
- 5. 人人文庫網僅提供信息存儲空間,僅對用戶上傳內容的表現方式做保護處理,對用戶上傳分享的文檔內容本身不做任何修改或編輯,并不能對任何下載內容負責。
- 6. 下載文件中如有侵權或不適當內容,請與我們聯系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
評論
0/150
提交評論