



版權說明:本文檔由用戶提供并上傳,收益歸屬內容提供方,若內容存在侵權,請進行舉報或認領
文檔簡介
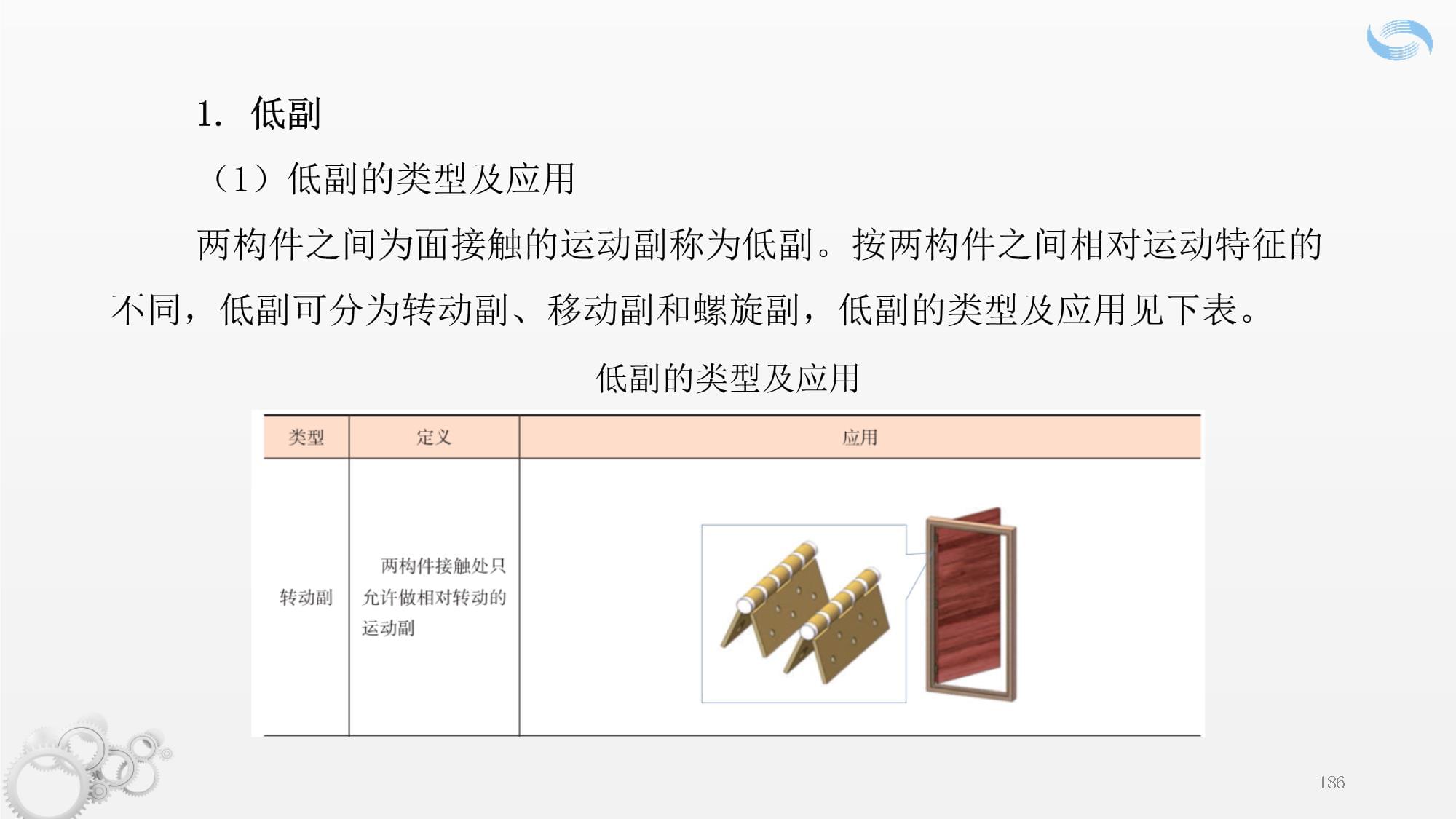
第4章機構182§4-1平面機構的組成§4-2平面四桿機構凸輪機構§4-3間歇運動機構§4-4§4-1平面機構的組成183一、平面機構機構是具有確定運動的構件系統(tǒng),其組成要素有構件和運動副。若組成機構的所有構件都在同一平面或相互平行的平面內運動,則稱該機構為平面機構,否則稱為空間機構。184二、平面運動副機械的重要特征是其各組成構件之間具有確定的相對運動,因此必須對各個構件的運動加以必要的限制。在機械中,每個構件都以一定方式與其他構件相互接觸,兩者之間形成一種可動的連接,從而使兩個相互接觸的構件之間的相對運動受到限制。兩個構件之間的這種可動連接稱為運動副。兩構件之間有不同的接觸方式,從而形成不同的運動副。1851.低副(1)低副的類型及應用兩構件之間為面接觸的運動副稱為低副。按兩構件之間相對運動特征的不同,低副可分為轉動副、移動副和螺旋副,低副的類型及應用見下表。186低副的類型及應用187低副的類型及應用(2)低副的結構及符號轉動副的表示方法如圖所示,小圓圈表示鉸鏈,線段表示構件,帶陰影線的構件表示機架(固定不動)。188轉動副的表示方法a)固定鉸鏈b)活動鉸鏈c)表示方法2.高副兩構件之間為點或線接觸的運動副稱為高副。按接觸方式不同,高副通常分為滾動輪接觸、凸輪接觸和齒輪接觸,高副的類型及應用見下表。189高副的類型及應用190高副的類型及應用*三、機構運動簡圖的測繪用簡單線條和符號來表示構件和運動副,并按比例定出各運動副的位置。這種說明機構各構件間相對運動關系的簡化圖形,稱為機構運動簡圖。1.機構分析(1)測繪時使被測繪的機構緩慢地運動,從主動件開始仔細觀察機構運動,分清各運動單元,確定主動件、機架、傳動部件和執(zhí)行部件,從而確定組成機構的構件數(shù)目和運動副的數(shù)目。(2)根據(jù)連接構件間的接觸情況及相對運動的性質,確定各個運動副的種類。191(3)選擇最能表現(xiàn)機構特征的平面作為視圖平面。(4)在稿紙上按規(guī)定的符號及構件的連接次序逐步畫出機構運動簡圖的草圖,然后用數(shù)字1、2、3…分別標出各構件,用
A、B、C…分別標出各運動副。(5)仔細測量機構各運動尺寸(如轉動副間的中心距、移動副導路的位置),對于高副則應仔細測出高副的輪廓曲線及其位置,然后以適當?shù)谋壤鳈C構運動簡圖。1921932.繪制機構運動簡圖的步驟了解清楚機械的實際構造、動作原理和運動情況。1選擇恰當?shù)臋C構運動簡圖視圖平面(通常選擇機械中多數(shù)構件的運動平面)。3確定各運動副的相對位置,用各運動副的代表符號、常用機構運動簡圖符號和簡單線條,繪制機構運動簡圖。5沿運動傳遞路線,逐一分析每兩個構件之間相對運動的性質,確定運動副的類型和數(shù)目。2選擇恰當?shù)淖鲌D比例。4在主動件上標出箭頭以表示其運動方向。6§4-2平面四桿機構194一、平面四桿機構的基本類型、特點和應用由一些剛性構件用轉動副和移動副相互連接而組成的,在同一平面或相互平行平面內運動的機構稱為平面連桿機構。平面連桿機構構件的形狀多種多樣,不一定為桿狀,但從運動原理來看,均可用等效的桿狀構件來代替。最常用的平面連桿機構是具有四個構件(包括機架)的低副機構,稱為平面四桿機構。195工程上常用的平面四桿機構的機構運動簡圖如圖所示。其中,如圖a所示的平面鉸鏈四桿機構是平面四桿機構的基本形式,也是其他多桿機構的基礎。196工程上常用的平面四桿機構的機構運動簡圖a)平面鉸鏈四桿機構b)平面滑塊四桿機構二、平面鉸鏈四桿機構如圖所示,在平面鉸鏈四桿機構中,固定不動的構件4稱為機架,不與機架直接相連的構件2稱為連桿,與機架相連的構件1、3稱為連架桿。平面鉸鏈四桿機構按兩連架桿的運動形式不同,分為曲柄搖桿機構、雙曲柄機構和雙搖桿機構三種基本類型。197平面鉸鏈四桿機構1.平面鉸鏈四桿機構類型的判別曲柄是能做整周旋轉的連架桿,只有這種能做整周旋轉的構件才能用電動機等連續(xù)轉動的裝置來帶動,所以,能做整周旋轉的構件在機構中具有重要地位,即曲柄是機構中的關鍵構件。平面鉸鏈四桿機構中是否存在曲柄,主要取決于機構中各桿的相對長度和機架的選擇。平面鉸鏈四桿機構存在曲柄,必須同時滿足兩個條件:最短桿與最長桿的長度之和小于或等于其他兩桿長度之和;連架桿和機架中必有一桿是最短桿。198根據(jù)曲柄存在條件,可以推論得出平面鉸鏈四桿機構三種基本類型的判別方法,見下表。199平面鉸鏈四桿機構三種基本類型的判別方法(AD為最長桿,AB為最短桿)200平面鉸鏈四桿機構三種基本類型的判別方法(AD
為最長桿,AB
為最短桿)2.平面鉸鏈四桿機構應用舉例201平面鉸鏈四桿機構應用舉例202平面鉸鏈四桿機構應用舉例203平面鉸鏈四桿機構應用舉例*三、平面四桿機構的基本性質如圖所示曲柄搖桿機構中,當曲柄整周回轉時,搖桿在
C1D
與
C2D兩極限位置之間往復擺動。當搖桿在
C1D、C2D
兩極限位置時,曲柄與連桿共線,對應兩位置所夾的銳角稱為極位夾角,用θ
表示。204曲柄搖桿機構機構的急回特性可用行程速比系數(shù)
K
表示,即式中——從動件工作行程的平均角速度,rad/s;——從動件空回行程的平均角速度,rad/s;
t1——從動件工作行程的所用時間,s;
t2——從動件空回行程的所用時間,s;
θ——極位夾角,(°)。205上式表明,當機構有極位夾角θ時,機構有急回特性;極位夾角θ
越大,機構的急回特性越明顯;極位夾角θ=0°時,機構往返所用的時間相同,機構無急回特性。平面四桿機構的急回特性可以節(jié)省非工作時間,提高生產(chǎn)效率,如牛頭刨床退刀速度明顯高于工作速度,就是利用了平面四桿機構的急回特性。2062.死點位置如圖所示曲柄搖桿機構中,若搖桿
CD
為主動件,曲柄AB為從動件,則當搖桿擺動到極限位置
C1D
或
C2D
時,連桿
BC
與從動曲柄
AB共線,主動搖桿
CD通過連桿BC
加于從動曲柄
AB
上的力將通過從動件的鉸鏈中心
A,從而使驅動力對從動曲柄
AB的回轉力矩為零,使機構轉不動或出現(xiàn)運動不確定現(xiàn)象。機構的這種位置稱為死點位置。207208曲柄搖桿機構的死點位置四、含有一個移動副的平面四桿機構1.曲柄滑塊機構曲柄滑塊機構是具有一個曲柄和一個滑塊的平面四桿機構,其應用實例見下表。209
曲柄滑塊機構應用實例210
曲柄滑塊機構應用實例2.導桿機構導桿是機構中與另一運動構件組成移動副的構件。連架桿中至少有一個構件為導桿的平面四桿機構稱為導桿機構。導桿機構可以看作是通過改變曲柄滑塊機構中固定件的位置演化而成的。當曲柄滑塊機構選取不同構件作為機架時,會得到不同的導桿機構類型。211§4-3凸輪機構212一、凸輪機構的組成、類型、特點及應用1.凸輪機構的組成凸輪機構是由凸輪、從動件和機架三個基本構件組成的高副機構,凸輪機構示意圖如圖所示。213凸輪機構示意圖2.凸輪機構的類型、特點及應用凸輪機構的類型很多,凸輪機構的類型、特點和應用見下表。214凸輪機構的類型、特點和應用215凸輪機構的類型、特點和應用216凸輪機構的類型、特點和應用二、凸輪機構從動件常用運動規(guī)律凸輪機構中最常用的運動形式為凸輪做等速回轉運動,從動件做往復移動。217從動件做升—停—降—停循環(huán)運動218從動件做升—停—降—停循環(huán)運動如圖所示的位移曲線圖反映了從動件的運動規(guī)律,通過對凸輪機構的一個運動循環(huán)的分析可知,從動件的運動規(guī)律決定凸輪的輪廓形狀。常用的從動件的運動規(guī)律有等速運動規(guī)律和等加速等減速運動規(guī)律。219位移曲線圖1.等速運動規(guī)律(以推程為例)從動件上升(或下降)的速度為一常數(shù)的運動規(guī)律稱為等速運動規(guī)律。從動件做等速運動時,會使凸輪機構產(chǎn)生強烈的剛性沖擊,因此,等速運動規(guī)律只適用于凸輪做低速回轉、輕載的場合。220等速運動規(guī)律2.等加速等減速運動規(guī)律(以推程為例)從動件在行程中先做等加速運動,后做等減速運動的運動規(guī)律稱為等加速等減速運動規(guī)律。從動件做等加速等減速運動時,會使凸輪機構產(chǎn)生柔性沖擊,這種柔性沖擊雖然比剛性沖擊要小得多,但也會對機器造成一定的破壞。因此,等加速等減速運動規(guī)律只適用于凸輪機構做中速回轉、輕載的場合。221等加速等減速運動規(guī)律三、凸輪機構的壓力角從動件的受力方向(接觸點的法線方向)與運動方向之間的夾角,稱為凸輪機構的壓力角,用α
表示,如圖所示。222凸輪機構的壓力角四、凸輪常用結構凸輪的種類很多,常需根據(jù)不同的工作要求進行設計和制造,如圖所示為常見凸輪。223常見凸輪凸輪常用結構見下表。224
凸輪常用結構225
凸輪常用結構§4-4間歇運動機構226一、棘輪機構棘輪機構是間歇運動機構的一種形式,它將主動件的連續(xù)運動轉換為從動件的間歇運動。棘輪機構的特點是結構簡單,制造方便,棘輪的轉角可在一定范圍內調節(jié),但工作時易產(chǎn)生沖擊和噪聲。它適用于低速、轉角不大和傳動平穩(wěn)性要求不高的場合。棘輪機構分為齒式棘輪機構和摩擦式棘輪機構。2271.齒式棘輪機構的組成及工作原理如圖所示為機械中常用的齒式棘輪機構,它主要由搖桿、棘輪、棘爪、止回棘爪等組成。棘輪機構通常由曲柄搖桿機構來驅動,棘輪用鍵與傳動軸相連接,搖桿空套在棘輪軸上。當搖桿逆時針擺動時,鉸接在搖桿上的棘爪插入棘輪的齒槽內,推動棘輪同向轉過一定角度;當搖桿順時針擺動時,棘爪從棘輪的齒背上滑過,棘輪靜止不動,止回棘爪起阻止棘輪回轉的作用。這樣,搖桿連續(xù)往復擺動,棘輪則間歇地做單方向轉動。228機械中常用的齒式棘輪機構2.齒式棘輪機構的常用類型及特點(1)單動式棘輪機構單動式棘輪機構如圖所示,該機構的特點是搖桿往復擺動一次,棘爪單方向推動棘輪間歇地轉動一次。229單動式棘輪機構(2)雙動式棘輪機構雙動式棘輪機構如圖所示,該機構在工作原理上可看作是兩個單動式棘輪機構輪流工作的組合,搖桿往復擺動時,兩個棘爪交替地推動棘輪做間歇轉動。這種機構的特點是搖桿往復擺動一次,能使棘輪沿同一方向間歇地轉動兩次,但每次停歇的時間較短,棘輪每次的轉角也較小。230雙動式棘輪機構(3)可變向棘輪機構可變向棘輪機構如圖所示,該機構的棘輪輪齒為矩形齒,棘爪做成對稱形狀。搖桿連續(xù)往復擺動,當棘爪處于圖示左側位置時,棘爪間歇地推動棘輪做逆時針方向轉動;若將棘爪翻轉到搖桿的另一側,則棘爪間歇地推動棘輪做順時針方向轉動。這種機構的基本特點是可使從動件實現(xiàn)雙向間歇運動。231可變向棘輪機構3.摩擦式棘輪機構簡介如圖所示,該機構的棘輪是一個沒有齒的摩擦輪,靠棘輪與棘爪之間的摩擦力進行傳動。這種機構的特點是能無級地調節(jié)棘輪轉角的大小,傳動平穩(wěn),噪聲小;但傳遞能力不大,適用于輕載場合
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯(lián)系上傳者。文件的所有權益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網(wǎng)頁內容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經(jīng)權益所有人同意不得將文件中的內容挪作商業(yè)或盈利用途。
- 5. 人人文庫網(wǎng)僅提供信息存儲空間,僅對用戶上傳內容的表現(xiàn)方式做保護處理,對用戶上傳分享的文檔內容本身不做任何修改或編輯,并不能對任何下載內容負責。
- 6. 下載文件中如有侵權或不適當內容,請與我們聯(lián)系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 化工產(chǎn)品的采購合同范本3篇
- 工程燃氣供應設計與施工合同2篇
- 使命合同班組3篇
- 家庭遺產(chǎn)分割協(xié)議書3篇
- 合同管理在建筑行業(yè)的重要性3篇
- 2025年醫(yī)療診斷服務合作協(xié)議書
- 2025年加脂劑合作協(xié)議書
- 燈具驗收合同協(xié)議
- 歸屬房屋合同協(xié)議
- 車輛二手合同協(xié)議
- 2024年1月浙江省普通高校招生選考物理試題和答案
- 新版工貿企業(yè)重大事故隱患-題庫
- 內蒙古建筑圖集 DBJ-T 03-76-2018 自保溫砌塊建筑構造圖集
- 企業(yè)規(guī)范化管理與標準化建設
- 物流營銷與客戶關系 習題答案 張廣敬
- CHT 8023-2011 機載激光雷達數(shù)據(jù)處理技術規(guī)范
- 河北省唐山市路北區(qū)2023-2024學年八年級下學期4月期中物理試題
- 幼兒園中班韻律《阿凡提尋寶記》課件
- 海面之下:海洋生物形態(tài)圖鑒
- 手衛(wèi)生與無菌操作
- 質量經(jīng)理能力培訓課件
評論
0/150
提交評論