



版權(quán)說明:本文檔由用戶提供并上傳,收益歸屬內(nèi)容提供方,若內(nèi)容存在侵權(quán),請進(jìn)行舉報或認(rèn)領(lǐng)
文檔簡介
1、注冊電氣工程師(供配電)專業(yè)注冊電氣工程師(供配電)專業(yè)執(zhí)業(yè)資格考試專業(yè)部分執(zhí)業(yè)資格考試專業(yè)部分17. 17. 電動機(jī)與電氣傳動電動機(jī)與電氣傳動北京建筑工程學(xué)院李惠昇17. 電動機(jī)與電氣傳動(考試大綱)電動機(jī)與電氣傳動(考試大綱)171 熟悉電氣傳動系統(tǒng)的組成及分類熟悉電氣傳動系統(tǒng)的組成及分類172 了解電動機(jī)的選擇了解電動機(jī)的選擇173 掌握交、直流電動機(jī)的起動方式及起動校驗(yàn)掌握交、直流電動機(jī)的起動方式及起動校驗(yàn)174 掌握交、直流電動機(jī)調(diào)速技術(shù)掌握交、直流電動機(jī)調(diào)速技術(shù)175 掌握交、直流電動機(jī)的電氣制動方式及計算方法掌握交、直流電動機(jī)的電氣制動方式及計算方法176 掌握電動機(jī)保護(hù)配置及計
2、算方法掌握電動機(jī)保護(hù)配置及計算方法177 熟悉低壓電動機(jī)控制電器的選擇熟悉低壓電動機(jī)控制電器的選擇178 了解電動機(jī)調(diào)速系統(tǒng)性能指標(biāo)了解電動機(jī)調(diào)速系統(tǒng)性能指標(biāo)179 了解傳動系統(tǒng)動態(tài)指標(biāo)的運(yùn)用了解傳動系統(tǒng)動態(tài)指標(biāo)的運(yùn)用1710 了解調(diào)節(jié)理論在電氣傳動工程中的運(yùn)用了解調(diào)節(jié)理論在電氣傳動工程中的運(yùn)用1711 熟悉熟悉PLC的組成及工作原理的組成及工作原理17. 電動機(jī)與電氣傳動電動機(jī)與電氣傳動171 電氣傳動系統(tǒng)的組成及分類電氣傳動系統(tǒng)的組成及分類1711 電氣傳動系統(tǒng)的組成電氣傳動系統(tǒng)的組成 電氣傳動控制系統(tǒng)通常由電動機(jī)、電電氣傳動控制系統(tǒng)通常由電動機(jī)、電源裝置和信息、控制裝置三部分組成源裝置和
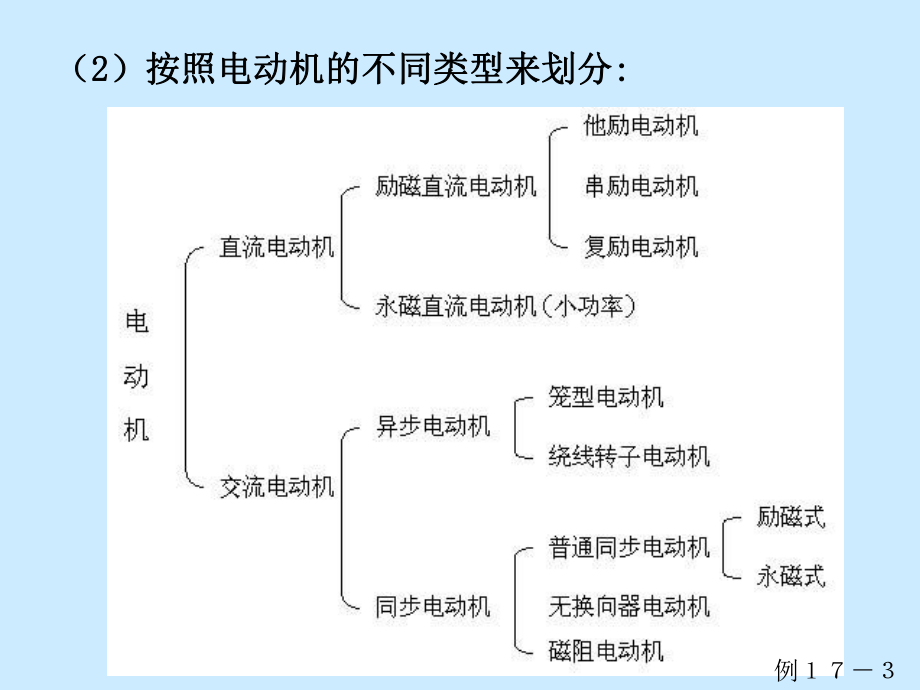
3、信息、控制裝置三部分組成。 電源裝置(電力電子變流器)電動機(jī)及設(shè)備信息裝置指令、控制裝置1712 電氣傳動的分類與比較電氣傳動的分類與比較 (1)按是否調(diào)速來劃分: 從節(jié)約電能、改善機(jī)械性能的角度,將有越來越多的調(diào)速傳動取代不調(diào)速傳動,如:風(fēng)機(jī)、泵類負(fù)載,平均可節(jié)電1520。電氣傳動不調(diào)速調(diào)速機(jī)械機(jī)電電氣開環(huán)閉環(huán) 例、(2 2)按照電動機(jī)的不同類型來劃分)按照電動機(jī)的不同類型來劃分: :例172 電動機(jī)的選擇電動機(jī)的選擇 1721 選擇電動機(jī)的原則選擇電動機(jī)的原則 (1 1)要從供電電網(wǎng)的質(zhì)量、起制動特性、調(diào)速)要從供電電網(wǎng)的質(zhì)量、起制動特性、調(diào)速性能、控制特性等幾個方面綜合考慮,選擇適當(dāng)性能
4、、控制特性等幾個方面綜合考慮,選擇適當(dāng)類型的電動機(jī)及其控制方式。類型的電動機(jī)及其控制方式。(2 2)額定功率要滿足負(fù)載需要,但不宜過大。)額定功率要滿足負(fù)載需要,但不宜過大。過大會使投資增高,而且會造成輕載運(yùn)行時損耗過大會使投資增高,而且會造成輕載運(yùn)行時損耗大、效率低、功率因數(shù)低、起動時沖擊大等問題。大、效率低、功率因數(shù)低、起動時沖擊大等問題。(3 3)根據(jù)溫升和使用環(huán)境條件,選擇合適的通)根據(jù)溫升和使用環(huán)境條件,選擇合適的通風(fēng)方式、結(jié)構(gòu)型式和防護(hù)等級。風(fēng)方式、結(jié)構(gòu)型式和防護(hù)等級。1721 選擇電動機(jī)的原則選擇電動機(jī)的原則 (4 4)按照現(xiàn)場使用狀況和被傳動機(jī)械的要求,)按照現(xiàn)場使用狀況和被傳
5、動機(jī)械的要求,選擇結(jié)構(gòu)和安裝方式,與傳動機(jī)械的連接方式,選擇結(jié)構(gòu)和安裝方式,與傳動機(jī)械的連接方式,傳動機(jī)構(gòu)有無振動和沖擊以及安裝基礎(chǔ)的牢固程傳動機(jī)構(gòu)有無振動和沖擊以及安裝基礎(chǔ)的牢固程度等。度等。(5 5)盡量選用可靠性高、互換性好、維護(hù)方)盡量選用可靠性高、互換性好、維護(hù)方便,且有標(biāo)準(zhǔn)定額的電動機(jī)。便,且有標(biāo)準(zhǔn)定額的電動機(jī)。(6 6)考慮初期投資和運(yùn)行費(fèi)用,要從電動機(jī))考慮初期投資和運(yùn)行費(fèi)用,要從電動機(jī)及其控制設(shè)備的總投資、效率、功率因數(shù)和電費(fèi)及其控制設(shè)備的總投資、效率、功率因數(shù)和電費(fèi)以及全部設(shè)備的年維修費(fèi)用等因素加以選擇。以及全部設(shè)備的年維修費(fèi)用等因素加以選擇。 172 電動機(jī)的選擇電動機(jī)的
6、選擇172 電動機(jī)的選擇電動機(jī)的選擇 1722 選擇電動選擇電動機(jī)的步驟機(jī)的步驟框圖框圖1722 選擇電動機(jī)的步驟選擇電動機(jī)的步驟1. 1. 電動機(jī)類型的選擇電動機(jī)類型的選擇 (1 1)根據(jù)環(huán)境條件選擇電動機(jī)的類型)根據(jù)環(huán)境條件選擇電動機(jī)的類型 不同的使用環(huán)境條件對電動機(jī)的結(jié)構(gòu)、通風(fēng)及不同的使用環(huán)境條件對電動機(jī)的結(jié)構(gòu)、通風(fēng)及類型均有不同的要求(詳見表類型均有不同的要求(詳見表2323-2-1 1)。 其中:其中:爆炸和火災(zāi)危險場所的分級詳見爆炸和火災(zāi)危險場所的分級詳見爆炸和火災(zāi)爆炸和火災(zāi)危險環(huán)境電力裝置設(shè)計規(guī)范危險環(huán)境電力裝置設(shè)計規(guī)范 IPIP的分級及定義詳見的分級及定義詳見GB4208GB4
7、2089393外殼防護(hù)等級(外殼防護(hù)等級(IPIP代代碼)碼)表表23-2-123-2-1設(shè)計規(guī)范設(shè)計規(guī)范IPIP代碼代碼172 電動機(jī)的選擇電動機(jī)的選擇(2 2)根據(jù)根據(jù)負(fù)載負(fù)載性質(zhì)性質(zhì)選擇選擇電動電動機(jī)的機(jī)的類型類型172 電動機(jī)的選擇電動機(jī)的選擇(3 3)直流與交流電動機(jī)的比較(自學(xué))直流與交流電動機(jī)的比較(自學(xué)) (4 4)交流電動機(jī)的選擇)交流電動機(jī)的選擇 1 1)普通勵磁同步電機(jī))普通勵磁同步電機(jī)優(yōu)點(diǎn):優(yōu)點(diǎn):電機(jī)功率因數(shù)高,電機(jī)功率因數(shù)高,用于變頻傳動時,電用于變頻傳動時,電機(jī)功率因數(shù)等于機(jī)功率因數(shù)等于“1 1”,使變頻裝置容量最小,變頻,使變頻裝置容量最小,變頻器輸入功率因數(shù)改善
8、;器輸入功率因數(shù)改善;效率比異步電機(jī)的高;效率比異步電機(jī)的高;氣隙比異步電機(jī)的大,大容量電機(jī)制造容易。氣隙比異步電機(jī)的大,大容量電機(jī)制造容易。缺點(diǎn):缺點(diǎn):需附加勵磁裝置;需附加勵磁裝置;變頻調(diào)速控制系統(tǒng)比變頻調(diào)速控制系統(tǒng)比異步電動機(jī)的復(fù)雜;異步電動機(jī)的復(fù)雜;應(yīng)用場合:應(yīng)用場合:大功率不調(diào)速傳動;大功率不調(diào)速傳動;600r600rminmin以下以下大功率交一交變頻傳動,例如軋機(jī)、卷揚(yáng)、船舶驅(qū)大功率交一交變頻傳動,例如軋機(jī)、卷揚(yáng)、船舶驅(qū)動、水泥磨機(jī)等。動、水泥磨機(jī)等。172 電動機(jī)的選擇電動機(jī)的選擇2)永磁同步電動機(jī))永磁同步電動機(jī) 永磁同步電動機(jī)與PWM變頻裝置配合使用,電流為正弦波。目前一般
9、容量在幾十千瓦以下但容量正在逐漸擴(kuò)大,目前已能做到上百千瓦,速度精度較高,在伺服系統(tǒng)中采用按轉(zhuǎn)子位置定向的矢量控制系統(tǒng),性能優(yōu)于其他電機(jī)(直流、異步或永磁無換向器電機(jī)),但成本略高,適用于高性能場合。172 電動機(jī)的選擇電動機(jī)的選擇3)無換向器電機(jī))無換向器電機(jī)a.特點(diǎn):特點(diǎn):輸入電流為輸入電流為120方波,導(dǎo)致轉(zhuǎn)矩脈動及低速性方波,導(dǎo)致轉(zhuǎn)矩脈動及低速性能差;能差;電路設(shè)計時需計及諧波電流帶來的附加損耗;電路設(shè)計時需計及諧波電流帶來的附加損耗;要求變頻器容量及勵磁電流較大;電機(jī)過載能要求變頻器容量及勵磁電流較大;電機(jī)過載能力差(力差(152),電機(jī)短粗,),電機(jī)短粗,GD2大。大。無轉(zhuǎn)速和頻率
10、上限。無轉(zhuǎn)速和頻率上限。b.應(yīng)用場合:應(yīng)用場合:大中功率用于負(fù)載平穩(wěn)、過載不多的場合,例大中功率用于負(fù)載平穩(wěn)、過載不多的場合,例如風(fēng)機(jī)、泵等,一般如風(fēng)機(jī)、泵等,一般600rmin以上;以上;小功率常與小功率常與PWM 變頻器配合,用于性能一般的變頻器配合,用于性能一般的伺服系統(tǒng)。伺服系統(tǒng)。172 電動機(jī)的選擇電動機(jī)的選擇4)異步電動機(jī))異步電動機(jī)a. 特點(diǎn):特點(diǎn):籠型電動機(jī)結(jié)構(gòu)簡單,制造容易,價格便宜;籠型電動機(jī)結(jié)構(gòu)簡單,制造容易,價格便宜;繞線轉(zhuǎn)子電動機(jī)可以通過在轉(zhuǎn)子回路中串電阻、頻敏電阻繞線轉(zhuǎn)子電動機(jī)可以通過在轉(zhuǎn)子回路中串電阻、頻敏電阻或通過雙饋改變電機(jī)特性,改善起動性能或?qū)崿F(xiàn)調(diào)速;或通過
11、雙饋改變電機(jī)特性,改善起動性能或?qū)崿F(xiàn)調(diào)速;功率因數(shù)及效率低。在采用變頻調(diào)速時加大變頻器容量;功率因數(shù)及效率低。在采用變頻調(diào)速時加大變頻器容量;氣隙小,大功率電機(jī)制造困難,氣隙小,大功率電機(jī)制造困難,調(diào)速控制系統(tǒng)比同步電動機(jī)的簡單。調(diào)速控制系統(tǒng)比同步電動機(jī)的簡單。b. 應(yīng)用場合應(yīng)用場合20003000kW以下、不調(diào)速、操作不頻繁場合,宜用籠以下、不調(diào)速、操作不頻繁場合,宜用籠型電動機(jī);型電動機(jī);20003000kw以下、不調(diào)速,但要求起動力矩大或操作以下、不調(diào)速,但要求起動力矩大或操作較頻繁場合,宜用繞線轉(zhuǎn)子電動機(jī);較頻繁場合,宜用繞線轉(zhuǎn)子電動機(jī);環(huán)境惡劣場合宜用籠型電動機(jī);環(huán)境惡劣場合宜用籠型
12、電動機(jī);20003000kW以下的交流調(diào)速系統(tǒng)。以下的交流調(diào)速系統(tǒng)。 172 電動機(jī)的選擇電動機(jī)的選擇5)磁阻電機(jī) 是一種與小功率籠型電動機(jī)競爭的新型調(diào)速電機(jī),轉(zhuǎn)子為實(shí)心鐵芯,d、q軸磁路不對稱,定子有多相繞組,利用大功率晶體管輪流接通定子各繞組,靠反應(yīng)力矩使電機(jī)旋轉(zhuǎn)。 這種電機(jī)調(diào)速裝置簡單,不用逆變器,無逆變失敗故障,可靠性高,它的結(jié)構(gòu)比籠型電動機(jī)簡單,而功率因數(shù)和效率兩者差不多。目前容量范圍在幾千瓦以下,個別達(dá)幾十千瓦,近些年用于小功率調(diào)速裝置。172 電動機(jī)的選擇電動機(jī)的選擇(5)直流電動機(jī)的選擇)直流電動機(jī)的選擇1)需要較大起動轉(zhuǎn)矩和恒功率調(diào)速的機(jī)械,如電車、牽引機(jī)車等,用直流串勵電動
13、機(jī)。2)其他使用直流機(jī)場合一般均用他勵直流電動機(jī)。注意要按生產(chǎn)機(jī)械的恒轉(zhuǎn)矩和恒功率調(diào)速范圍,合理地選擇電動機(jī)的基速及弱磁倍數(shù)。2. 2. 電動機(jī)轉(zhuǎn)速的選擇電動機(jī)轉(zhuǎn)速的選擇 應(yīng)從技術(shù)指標(biāo)及經(jīng)濟(jì)指標(biāo)全面考慮。應(yīng)從技術(shù)指標(biāo)及經(jīng)濟(jì)指標(biāo)全面考慮。172 電動機(jī)的選擇電動機(jī)的選擇3. 3. 電動機(jī)功率、轉(zhuǎn)矩的選擇(電動機(jī)的容量校驗(yàn))電動機(jī)功率、轉(zhuǎn)矩的選擇(電動機(jī)的容量校驗(yàn))(1)恒定負(fù)載連續(xù)工作制下電動機(jī)的容量校驗(yàn))恒定負(fù)載連續(xù)工作制下電動機(jī)的容量校驗(yàn)1)計算電動機(jī)的額定功率)計算電動機(jī)的額定功率 選擇電動機(jī)的額定功率選擇電動機(jī)的額定功率PN略大于折算到電動機(jī)軸上的略大于折算到電動機(jī)軸上的負(fù)載功率負(fù)載功率
14、PL式中式中TL折算到電動機(jī)軸上的靜負(fù)載轉(zhuǎn)矩(折算到電動機(jī)軸上的靜負(fù)載轉(zhuǎn)矩(Nm);); nN電動機(jī)的額定轉(zhuǎn)速(電動機(jī)的額定轉(zhuǎn)速(rmin) 當(dāng)負(fù)載轉(zhuǎn)矩恒定,需從基速向上調(diào)速時,其額定功當(dāng)負(fù)載轉(zhuǎn)矩恒定,需從基速向上調(diào)速時,其額定功率應(yīng)按要求的最高工作轉(zhuǎn)速率應(yīng)按要求的最高工作轉(zhuǎn)速nmax計算:計算: 172 電動機(jī)的選擇電動機(jī)的選擇2)校驗(yàn)起動過程中的最小轉(zhuǎn)矩及允許的最大飛輪力矩 對起動條件沉重(靜負(fù)載轉(zhuǎn)矩大或帶有較大的飛輪力矩)而采用籠型異步電動機(jī)或同步電動機(jī)傳動時,在選定PN后還要按下面兩式分別校驗(yàn)電動機(jī)的最小起動轉(zhuǎn)矩TMmin和允許的最大飛輪矩GDxm2式中 :TLmax起動過程中可能出現(xiàn)
15、的最大負(fù)載轉(zhuǎn)矩(Nm);KS保證起動時有足夠加速轉(zhuǎn)矩的系數(shù), 一般取KS=1.151.25; Ku電壓波動系數(shù),起動時電動機(jī)端電壓與額定電壓之比,全壓起動時,取Ku=0.85172 電動機(jī)的選擇電動機(jī)的選擇允許的最大飛輪力矩GD xm2為(大型生產(chǎn)機(jī)械)式中GD mec2折算到電動機(jī)軸上傳動機(jī)械的最大飛輪力矩(Nm2) GD 02包括電動機(jī)在內(nèi)的整個傳動系統(tǒng)允許的最 大飛輪力矩(Nm 2),由電機(jī)資料中查取; GDM2電動機(jī)轉(zhuǎn)子的飛輪力矩(Nm2); Tsav電動機(jī)的平均起動轉(zhuǎn)矩(Nm),見表23-2-4。 172 電動機(jī)的選擇電動機(jī)的選擇(2)短時工作制下電動機(jī)的容量校驗(yàn))短時工作制下電動機(jī)
16、的容量校驗(yàn)式中式中 PLmax短時負(fù)載功率的最大值(短時負(fù)載功率的最大值(kW);); 電動機(jī)允許的轉(zhuǎn)矩過載倍數(shù),見表電動機(jī)允許的轉(zhuǎn)矩過載倍數(shù),見表23-2-5。(3)變動負(fù)載連續(xù)周期工作制下電動機(jī)的容量校驗(yàn))變動負(fù)載連續(xù)周期工作制下電動機(jī)的容量校驗(yàn)1 1)發(fā)熱校驗(yàn))發(fā)熱校驗(yàn) 變動負(fù)載連續(xù)周期工作制下電動機(jī)的變動負(fù)載連續(xù)周期工作制下電動機(jī)的功率計算,可先按功率計算,可先按等效(方均根)轉(zhuǎn)矩或等效電流法等效(方均根)轉(zhuǎn)矩或等效電流法,計算出一個周期計算出一個周期T內(nèi)的等效轉(zhuǎn)矩內(nèi)的等效轉(zhuǎn)矩Trms或等效電流或等效電流Irms。選取額定轉(zhuǎn)矩選取額定轉(zhuǎn)矩TNTrms或額定電流或額定電流INIrms。
17、172 電動機(jī)的選擇電動機(jī)的選擇式中:T1Tn各分段時間內(nèi)的轉(zhuǎn)矩值(Nm); I1In各分段時間內(nèi)的電流值(A); T一個周期的總時間(s), 當(dāng)負(fù)載波形不是當(dāng)負(fù)載波形不是矩形,則應(yīng)將每矩形,則應(yīng)將每一個相應(yīng)的時間一個相應(yīng)的時間間隔內(nèi)的轉(zhuǎn)矩或間隔內(nèi)的轉(zhuǎn)矩或電流值換算成等電流值換算成等效平均值后,同效平均值后,同樣可用上面兩式樣可用上面兩式計算計算T rms或或I rms。 a)矩形負(fù)載 b)梯形或三角形負(fù)載 172 電動機(jī)的選擇電動機(jī)的選擇2)校驗(yàn)最大過載轉(zhuǎn)矩)校驗(yàn)最大過載轉(zhuǎn)矩 按按T rms或或I rms選取電動機(jī)的選取電動機(jī)的額定功率以后,還要用最大負(fù)載轉(zhuǎn)矩額定功率以后,還要用最大負(fù)載轉(zhuǎn)矩
18、TLmax校驗(yàn)電動校驗(yàn)電動機(jī)的過載能力。機(jī)的過載能力。式中:式中:K u電網(wǎng)電壓波動系數(shù),電網(wǎng)電壓波動系數(shù),一般對于同步電動機(jī),一般對于同步電動機(jī),K u =0.85;對于異步;對于異步電動機(jī),電動機(jī),K u= 0.72;對于直流電動機(jī),;對于直流電動機(jī),K u= 1.0;轉(zhuǎn)矩過載倍數(shù)(見表轉(zhuǎn)矩過載倍數(shù)(見表23)0.9:考慮計算誤差和參數(shù)波動而取的安全系數(shù):考慮計算誤差和參數(shù)波動而取的安全系數(shù)172 電動機(jī)的選擇電動機(jī)的選擇(4)斷續(xù)周期工作制下電動機(jī)的容量校驗(yàn)斷續(xù)周期工作制下電動機(jī)的典型負(fù)載見圖 172 電動機(jī)的選擇電動機(jī)的選擇1)按等效轉(zhuǎn)矩(或等效電流)法校驗(yàn)發(fā)熱a)選用斷續(xù)定額電動機(jī)時
19、,對于圖23-2-2所示的負(fù)載圖,電動機(jī)在一個工作周期內(nèi)的等效(方均根)轉(zhuǎn)矩Trms或等效(方均根)電流Irms為172 電動機(jī)的選擇電動機(jī)的選擇b)選用連續(xù)定額電動機(jī)時C起制動過程中電動機(jī)散熱惡化系數(shù), C =(lC)2;C停止時電動機(jī)散熱惡化系數(shù)。t 0一個周期中停歇時間的總和(s); 172 電動機(jī)的選擇電動機(jī)的選擇 當(dāng)選斷續(xù)工作制電機(jī),應(yīng)計算實(shí)際負(fù)載持續(xù)率為 當(dāng)實(shí)際負(fù)載持續(xù)率FC值(工作時間占周期時間的百分比)與所選的電動機(jī)的額定負(fù)載持續(xù)率FCN值不相等(但相差不多)時,應(yīng)將上式算出的T rms或Irms值折算到對應(yīng)于電動機(jī)的FCN值相等效的值, 當(dāng)所選電動機(jī)的額定轉(zhuǎn)矩TNTrms或額
20、定電流INIrms時,則表示電動機(jī)的發(fā)熱校驗(yàn)通過。 172 電動機(jī)的選擇電動機(jī)的選擇 173 交、直流電動機(jī)的起動方式交、直流電動機(jī)的起動方式及起動校驗(yàn)及起動校驗(yàn)(掌握掌握)17173 3 1 1 交流電動機(jī)的起動交流電動機(jī)的起動1.1.全壓起動(直接起動)全壓起動(直接起動) 籠型異步電動機(jī)和同步電動機(jī)滿足下列條件時,籠型異步電動機(jī)和同步電動機(jī)滿足下列條件時,可以采用全壓起動。可以采用全壓起動。1 1)起動時對電網(wǎng)造成的電壓降不超過規(guī)定的數(shù)值。)起動時對電網(wǎng)造成的電壓降不超過規(guī)定的數(shù)值。一般需要經(jīng)常起動時,其電壓降不得超過一般需要經(jīng)常起動時,其電壓降不得超過1010,偶而,偶而起動時不超過起
21、動時不超過1515。在保證生產(chǎn)機(jī)械所要求的起動轉(zhuǎn)。在保證生產(chǎn)機(jī)械所要求的起動轉(zhuǎn)矩而又不致影響其他用電設(shè)備的正常工作時,其電壓矩而又不致影響其他用電設(shè)備的正常工作時,其電壓降可允許為降可允許為2020或更大一些。或更大一些。2 2)起動功率不超過供電設(shè)備和電網(wǎng)的過載能力。籠)起動功率不超過供電設(shè)備和電網(wǎng)的過載能力。籠型異步電動機(jī)允許全壓起動的功率和電源容量之間的型異步電動機(jī)允許全壓起動的功率和電源容量之間的關(guān)系見表關(guān)系見表23-3-123-3-1。2.2.減壓起動減壓起動 (1 1)繞線轉(zhuǎn)子異步電動機(jī)轉(zhuǎn)子串電阻分級起動)繞線轉(zhuǎn)子異步電動機(jī)轉(zhuǎn)子串電阻分級起動 173 交、直流電動機(jī)的起動方式及起動
22、校驗(yàn)交、直流電動機(jī)的起動方式及起動校驗(yàn)(2 2)繞線轉(zhuǎn)子異步電動機(jī)轉(zhuǎn)子串頻敏變阻器起動)繞線轉(zhuǎn)子異步電動機(jī)轉(zhuǎn)子串頻敏變阻器起動 起動時:起動時: 則則: : 表現(xiàn)為阻抗大,相當(dāng)于串電阻,當(dāng)轉(zhuǎn)速升高后,s減小,其等效阻抗隨轉(zhuǎn)差率的減小而相應(yīng)地減小,從而起到減小起動電流并得到起動轉(zhuǎn)矩近似恒定的起動特性。12sff 100nnns12ff 173 交、直流電動機(jī)的起動方式及起動校驗(yàn)交、直流電動機(jī)的起動方式及起動校驗(yàn) 采用頻敏變阻器起動,其優(yōu)點(diǎn)是可省去龐大采用頻敏變阻器起動,其優(yōu)點(diǎn)是可省去龐大的起動電阻器,線路簡單,維修簡便。但因其功的起動電阻器,線路簡單,維修簡便。但因其功率因數(shù)低、起動轉(zhuǎn)矩小,對要
23、求在低速下運(yùn)轉(zhuǎn)和率因數(shù)低、起動轉(zhuǎn)矩小,對要求在低速下運(yùn)轉(zhuǎn)和起動轉(zhuǎn)矩大的場合,不宜采用。起動轉(zhuǎn)矩大的場合,不宜采用。(3 3)籠型異步電動機(jī)減壓起動)籠型異步電動機(jī)減壓起動 (見表(見表23-3-223-3-2) 鼠籠轉(zhuǎn)子異步電動機(jī)轉(zhuǎn)子電路在內(nèi)部閉合,鼠籠轉(zhuǎn)子異步電動機(jī)轉(zhuǎn)子電路在內(nèi)部閉合,不能外串起動設(shè)備,只能在定子電路中采取措施。不能外串起動設(shè)備,只能在定子電路中采取措施。其減壓起動方法主要有定子電路串電阻起動、其減壓起動方法主要有定子電路串電阻起動、Y Y起動、延邊三角形起動和自耦變壓器減壓起動起動、延邊三角形起動和自耦變壓器減壓起動等。等。 (4 4)同步電動機(jī)減壓起動)同步電動機(jī)減壓起動
24、 (見表(見表23-3-223-3-2) 表表23-3-223-3-2173 交、直流電動機(jī)的起動方式及起動校驗(yàn)交、直流電動機(jī)的起動方式及起動校驗(yàn)3.3.變頻起動變頻起動 173 交、直流電動機(jī)的起動方式及起動校驗(yàn)交、直流電動機(jī)的起動方式及起動校驗(yàn)K2K3K1173 2 直流電動機(jī)的起動直流電動機(jī)的起動 (1)直流他(并)勵電動機(jī)的起動)直流他(并)勵電動機(jī)的起動 直流他勵電動機(jī)作為閉環(huán)調(diào)速系統(tǒng)的拖動直流他勵電動機(jī)作為閉環(huán)調(diào)速系統(tǒng)的拖動電機(jī)時,通常采用晶閘管調(diào)壓裝置為電樞供電。電機(jī)時,通常采用晶閘管調(diào)壓裝置為電樞供電。 直流并勵電動機(jī)如果采用電樞串電阻分級起直流并勵電動機(jī)如果采用電樞串電阻分級
25、起動,其計算方法與繞線轉(zhuǎn)子異步電動機(jī)轉(zhuǎn)子串動,其計算方法與繞線轉(zhuǎn)子異步電動機(jī)轉(zhuǎn)子串電阻分級起動的分析計算方法完全一樣。電阻分級起動的分析計算方法完全一樣。173 交、直流電動機(jī)的起動方式及起動校驗(yàn)交、直流電動機(jī)的起動方式及起動校驗(yàn)(2)直流串勵電動機(jī)串電阻起動)直流串勵電動機(jī)串電阻起動對于直流串勵電動機(jī),由于其機(jī)械特性為非對于直流串勵電動機(jī),由于其機(jī)械特性為非線性,采用解析法計算較困難,通常多采用線性,采用解析法計算較困難,通常多采用圖解法,方法同繞線轉(zhuǎn)子異步機(jī)串電阻起動圖解法,方法同繞線轉(zhuǎn)子異步機(jī)串電阻起動(見(見358頁)。頁)。173 3 起動的校驗(yàn)起動的校驗(yàn) 對于直流電動機(jī),因其起動轉(zhuǎn)
26、矩可以在對于直流電動機(jī),因其起動轉(zhuǎn)矩可以在規(guī)定范圍內(nèi)任意調(diào)節(jié),因此不必做起動校驗(yàn)。規(guī)定范圍內(nèi)任意調(diào)節(jié),因此不必做起動校驗(yàn)。173 交、直流電動機(jī)的起動方式及起動校驗(yàn)交、直流電動機(jī)的起動方式及起動校驗(yàn)174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù) 1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) (掌握掌握) 1. 基本概念基本概念調(diào)速:調(diào)速: 通過改變電動機(jī)的參數(shù)或外加電壓等方法來改變電機(jī)的機(jī)械特性,使電動機(jī)的穩(wěn)定運(yùn)轉(zhuǎn)速度發(fā)生變化。 開環(huán)控制系統(tǒng):開環(huán)控制系統(tǒng): 電動機(jī)的轉(zhuǎn)速只能跟隨轉(zhuǎn)速指令變化而不能自動糾正與給定轉(zhuǎn)速的偏差的調(diào)速系統(tǒng)稱為開環(huán)控制系統(tǒng)。 閉環(huán)控制系統(tǒng):閉環(huán)控制系統(tǒng):能自動糾
27、正電動機(jī)的轉(zhuǎn)速與給定轉(zhuǎn)速的偏差同時不受負(fù)載及電網(wǎng)電壓波動等外界擾動的影響,使電動機(jī)的轉(zhuǎn)速始終與給定轉(zhuǎn)速持一致的調(diào)速系統(tǒng)稱為閉環(huán)控制系統(tǒng)。 1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 無級調(diào)速:無級調(diào)速: 又稱連續(xù)調(diào)速指電動機(jī)的轉(zhuǎn)速可以平滑地調(diào)節(jié)。其特點(diǎn)是轉(zhuǎn)速變化均勻適應(yīng)性強(qiáng),容易實(shí)現(xiàn)自動調(diào)速,因而在工業(yè)中被廣泛應(yīng)用。有級調(diào)速有級調(diào)速: 又稱間斷調(diào)速或分級調(diào)速,它的轉(zhuǎn)速只有有限的幾級,調(diào)速范圍有限且不容易實(shí)現(xiàn)自動調(diào)速。 向上調(diào)速:向上調(diào)速:從基速提高轉(zhuǎn)速的調(diào)速稱為向上調(diào)速。例如直流電動機(jī)改變磁通進(jìn)行調(diào)速,其調(diào)速極限受電動機(jī)的換向條件和機(jī)械強(qiáng)度的限制。向下調(diào)速:向下調(diào)速: 從基速降低轉(zhuǎn)速的調(diào)速
28、稱為向下調(diào)速。例如,直流電動機(jī)改變電樞電壓進(jìn)行調(diào)速,調(diào)速的極限轉(zhuǎn)速即最低轉(zhuǎn)速受轉(zhuǎn)速穩(wěn)定性的限制。 174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)恒轉(zhuǎn)矩調(diào)速:恒轉(zhuǎn)矩調(diào)速: 對于某些工作機(jī)械其負(fù)載性質(zhì)屬于恒轉(zhuǎn)矩類型即在不同的穩(wěn)定速度下要求電動機(jī)的轉(zhuǎn)矩不變。如果所用的調(diào)速方法能使電動機(jī)的轉(zhuǎn)矩與電動機(jī)的電樞電流之比為一常數(shù)則在恒轉(zhuǎn)矩負(fù)載下電動機(jī)無論在高速或低速下運(yùn)行其發(fā)熱情況始終是一樣的這將能充分利用電動機(jī)。這種調(diào)速辦法稱為恒轉(zhuǎn)矩調(diào)速。例如保持電動機(jī)磁通不變改變電動機(jī)電樞電壓或電樞回路電阻來調(diào)速的方法就屬于恒轉(zhuǎn)矩調(diào)速。 1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 174 交、直流電動機(jī)調(diào)速技
29、術(shù)交、直流電動機(jī)調(diào)速技術(shù)174 41 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 恒功率調(diào)速:恒功率調(diào)速: 對于機(jī)床類負(fù)載:當(dāng)切削量大時(即T大)要求切削速度(即n)低;當(dāng)切削量小時(即T小)要求切削速度(即n)高;但每種工況下T n的乘積近似不變,這類負(fù)載屬于恒功率負(fù)載。為了配合這類負(fù)載,可以采用減弱磁通的方法調(diào)速。根據(jù)公式 enaCRIU當(dāng)磁通減小時,轉(zhuǎn)速n將升高,而轉(zhuǎn)矩T將減小。這種保持電動機(jī)電樞電壓不變、減弱電動機(jī)磁通的調(diào)速方式與上述恒功率負(fù)載的要求相一致,稱為恒功率調(diào)速。aICTT174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 對于恒功率
30、負(fù)載,應(yīng)盡量采用恒功率調(diào)速方式;對于恒轉(zhuǎn)矩負(fù)載應(yīng)盡量采用恒轉(zhuǎn)矩調(diào)速方式。只有這樣電動機(jī)才能得到充分利用。圖17411 調(diào)壓與調(diào)磁時電動機(jī)的調(diào)速特性 調(diào)壓恒轉(zhuǎn)矩 調(diào)磁恒功率174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 2. 調(diào)速系統(tǒng)的性能指標(biāo)調(diào)速系統(tǒng)的性能指標(biāo)(1)靜態(tài)指標(biāo))靜態(tài)指標(biāo)a. 調(diào)速范圍調(diào)速范圍生產(chǎn)機(jī)械要求電動機(jī)能提供的最高轉(zhuǎn)速生產(chǎn)機(jī)械要求電動機(jī)能提供的最高轉(zhuǎn)速max最低轉(zhuǎn)最低轉(zhuǎn)速速min之比叫做調(diào)速范圍。常用之比叫做調(diào)速范圍。常用D表示,即表示,即式中式中 max 和和nmin 一般都指額定負(fù)載時的轉(zhuǎn)速。一般都指額定負(fù)載時的轉(zhuǎn)速。
31、閉環(huán)調(diào)速系統(tǒng)的調(diào)速范圍可達(dá)閉環(huán)調(diào)速系統(tǒng)的調(diào)速范圍可達(dá)100:1或更大。或更大。minmaxnnD 174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 2.調(diào)速系統(tǒng)的性能指標(biāo)調(diào)速系統(tǒng)的性能指標(biāo) (1)靜態(tài)指標(biāo))靜態(tài)指標(biāo)b. 靜差率靜差率電動機(jī)在某一轉(zhuǎn)速下運(yùn)行時,負(fù)載由理想空載變到額電動機(jī)在某一轉(zhuǎn)速下運(yùn)行時,負(fù)載由理想空載變到額定負(fù)載時所產(chǎn)生的轉(zhuǎn)速降落與額定負(fù)載時的轉(zhuǎn)速之比定負(fù)載時所產(chǎn)生的轉(zhuǎn)速降落與額定負(fù)載時的轉(zhuǎn)速之比稱為靜差率(又稱轉(zhuǎn)速變化率)稱為靜差率(又稱轉(zhuǎn)速變化率)s,常用百分?jǐn)?shù)表示,常用百分?jǐn)?shù)表示,即即式中式中 n。電動機(jī)理想空載轉(zhuǎn)速;電動
32、機(jī)理想空載轉(zhuǎn)速; n 電動機(jī)額定負(fù)載時的轉(zhuǎn)速。電動機(jī)額定負(fù)載時的轉(zhuǎn)速。閉環(huán)調(diào)速系統(tǒng)的靜差率一般為閉環(huán)調(diào)速系統(tǒng)的靜差率一般為10-210-3。174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 2.調(diào)速系統(tǒng)的性能指標(biāo)調(diào)速系統(tǒng)的性能指標(biāo) (1)靜態(tài)指標(biāo))靜態(tài)指標(biāo)c. 穩(wěn)速精度穩(wěn)速精度 在穩(wěn)速系統(tǒng)中常用穩(wěn)速精度的概念,即在規(guī)定的電在穩(wěn)速系統(tǒng)中常用穩(wěn)速精度的概念,即在規(guī)定的電網(wǎng)質(zhì)量和負(fù)載擾動的條件下,在規(guī)定的運(yùn)行時間(如網(wǎng)質(zhì)量和負(fù)載擾動的條件下,在規(guī)定的運(yùn)行時間(如1h或或8h)內(nèi),在某一指定的轉(zhuǎn)速下,)內(nèi),在某一指定的轉(zhuǎn)速下,t時間(通常時間(通常t取
33、取1s)內(nèi)平均轉(zhuǎn)速最大值)內(nèi)平均轉(zhuǎn)速最大值nmax和另一個和另一個t時間內(nèi)平均轉(zhuǎn)速時間內(nèi)平均轉(zhuǎn)速最小值最小值nmin的相對誤差的百分值,來表明穩(wěn)速系統(tǒng)的的相對誤差的百分值,來表明穩(wěn)速系統(tǒng)的性能性能數(shù)字穩(wěn)速系統(tǒng)的穩(wěn)速精度可達(dá)數(shù)字穩(wěn)速系統(tǒng)的穩(wěn)速精度可達(dá)10- 410-5。174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 2.調(diào)速系統(tǒng)的性能指標(biāo)調(diào)速系統(tǒng)的性能指標(biāo) (2)動態(tài)指標(biāo))動態(tài)指標(biāo) 直流傳動系統(tǒng)的動態(tài)指標(biāo)是指在控制直流傳動系統(tǒng)的動態(tài)指標(biāo)是指在控制 2) 斜坡平頂信號斜坡平頂信號信號或擾動信號的作用下,系統(tǒng)輸出信號或擾動信號的作用下,系統(tǒng)輸出在動
34、態(tài)響應(yīng)中的各項(xiàng)指標(biāo)。在動態(tài)響應(yīng)中的各項(xiàng)指標(biāo)。(1)控制信號作用下的動態(tài)指標(biāo))控制信號作用下的動態(tài)指標(biāo)電氣傳動系統(tǒng)中常用的控制信號電氣傳動系統(tǒng)中常用的控制信號通常有以下兩種:通常有以下兩種:1) 單位階躍信號單位階躍信號174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 2.調(diào)速系統(tǒng)的性能指標(biāo)調(diào)速系統(tǒng)的性能指標(biāo) (2)動態(tài)指標(biāo))動態(tài)指標(biāo)a. 跟隨性跟隨性在階躍信號C(t)的作用下,輸出量Y(t)的動態(tài)響應(yīng)如圖 1)起調(diào)時間ta,又稱響應(yīng)時間,是指輸出量Y(t)第一次達(dá)到穩(wěn)態(tài)值的時間。2)調(diào)節(jié)時間tr,是指Y(t)進(jìn)入穩(wěn)態(tài)值的(25)區(qū)域內(nèi),而不再逸
35、出的時間又稱為過渡過程時間。174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 2.調(diào)速系統(tǒng)的性能指標(biāo)調(diào)速系統(tǒng)的性能指標(biāo) (2)動態(tài)指標(biāo))動態(tài)指標(biāo)3)超調(diào)量%,是指Y(t)超過其穩(wěn)態(tài)值的最大數(shù)值與穩(wěn)態(tài)值之比,用百分?jǐn)?shù)表示4)振蕩次數(shù)N,是指Y(t)在整個調(diào)節(jié)過程中圍繞穩(wěn)態(tài)值擺動的次數(shù)。 174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 2.調(diào)速系統(tǒng)的性能指標(biāo)調(diào)速系統(tǒng)的性能指標(biāo) (2)動態(tài)指標(biāo))動態(tài)指標(biāo)b. 擾動性系統(tǒng)的擾動特性是指在擾動信號F(t)的作用下,系統(tǒng)輸出量Y(t)的動態(tài)性能。在直流調(diào)速
36、系統(tǒng)中,常遇到的也是最嚴(yán)重的擾動為單位階躍擾動。階躍擾動通常表示為174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 2.調(diào)速系統(tǒng)的性能指標(biāo)調(diào)速系統(tǒng)的性能指標(biāo) (2)動態(tài)指標(biāo))動態(tài)指標(biāo)1)動態(tài)波動量(動態(tài)偏差)m,是指輸出量偏離原來穩(wěn)態(tài)值的最大偏差與原來穩(wěn)態(tài)值之比。2)回升時間tt,是指輸出量第一次回到擾動信號作用前輸出值時對應(yīng)的時間。3)恢復(fù)時間tS,是指輸出量進(jìn)入原穩(wěn)態(tài)值Y(0)的9598范圍內(nèi),并不再超出的時間。以上三個指標(biāo)是衡量系統(tǒng)對擾動響應(yīng)的主要指標(biāo)。 174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流
37、電動機(jī)調(diào)速技術(shù) 3.直流電動機(jī)的調(diào)速方案直流電動機(jī)的調(diào)速方案1) 直流電動機(jī)的調(diào)速原理直流電動機(jī)的調(diào)速原理直流電動機(jī)的機(jī)械特性方程式為直流電動機(jī)的機(jī)械特性方程式為 式中式中n0理想空載轉(zhuǎn)速,理想空載轉(zhuǎn)速,n0= UC e; ; U加在電樞回路上的電壓;加在電樞回路上的電壓; Ce電動勢常數(shù);電動勢常數(shù); 電動機(jī)磁通;電動機(jī)磁通; CT T轉(zhuǎn)矩常數(shù);轉(zhuǎn)矩常數(shù); R 0電動機(jī)電樞回路的電阻;電動機(jī)電樞回路的電阻; T電動機(jī)轉(zhuǎn)矩。電動機(jī)轉(zhuǎn)矩。 R 電動機(jī)電樞回路的外串電阻;電動機(jī)電樞回路的外串電阻;可見,改變可見,改變R、U及及中的任何一個參數(shù),都可以改變電動機(jī)中的任何一個參數(shù),都可以改變電動機(jī)的機(jī)
38、械特性,從而對電動機(jī)進(jìn)行調(diào)速。的機(jī)械特性,從而對電動機(jī)進(jìn)行調(diào)速。TCCRRnTCCRRCUnTeTee20020174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 3.直流電動機(jī)的調(diào)速方案直流電動機(jī)的調(diào)速方案2) 改變電樞回路電阻調(diào)速改變電樞回路電阻調(diào)速 當(dāng)電樞回路串聯(lián)附加電阻當(dāng)電樞回路串聯(lián)附加電阻R時,時,其特性方程式變?yōu)槠涮匦苑匠淌阶優(yōu)門CCRRnnTe200式中式中BRARCCTRCCTnnTeLTeL2020020RCCTnATeL2TeLCCTB174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)
39、速技術(shù) 3.直流電動機(jī)的調(diào)速方案直流電動機(jī)的調(diào)速方案2) 改變電樞回路電阻調(diào)速改變電樞回路電阻調(diào)速 當(dāng)電樞回路串聯(lián)附加電阻當(dāng)電樞回路串聯(lián)附加電阻R時,其特性曲線如下時,其特性曲線如下 串聯(lián)電阻調(diào)速的機(jī)械特性、 調(diào)速特性 174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速直流電動機(jī)調(diào)速技術(shù)技術(shù) 3.直流電動機(jī)的調(diào)速方案直流電動機(jī)的調(diào)速方案2) 改變電樞回路電阻調(diào)速改變電樞回路電阻調(diào)速 當(dāng)電樞回路串、并聯(lián)附當(dāng)電樞回路串、并聯(lián)附加電阻時,其電路圖與機(jī)加電阻時,其電路圖與機(jī)械特性圖如右械特性圖如右式中 K系數(shù), K=RB(RBR);RB并聯(lián)的電阻; R串聯(lián)的電阻。 174 交
40、、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 3.直流電動機(jī)的調(diào)速方案直流電動機(jī)的調(diào)速方案3)改變電樞電壓調(diào)速)改變電樞電壓調(diào)速當(dāng)改變電樞電壓時,理想空載轉(zhuǎn)速當(dāng)改變電樞電壓時,理想空載轉(zhuǎn)速n0也將改變,但機(jī)也將改變,但機(jī)械特性的斜率不變,這時機(jī)械特性如下械特性的斜率不變,這時機(jī)械特性如下式中 U改變后的電樞電壓; n0改變電壓后的理想空載轉(zhuǎn)速; Km特性曲線的斜率。TKnTCCRCUnmTee020174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 3.直流電動機(jī)的調(diào)速方案比較直流電動機(jī)的調(diào)速方案比較表
41、2341 直流電動機(jī)改變電壓調(diào)速的方法變壓方法變壓方法原理電路原理電路裝置組成裝置組成性能及適用場合性能及適用場合電動機(jī)發(fā)電機(jī)組(旋轉(zhuǎn)變流機(jī)組)原動機(jī)可用同步電動機(jī)、繞線轉(zhuǎn)子異步電動機(jī)(包括帶飛輪和轉(zhuǎn)差調(diào)節(jié)的機(jī)組)、籠型異步電動機(jī)、柴油機(jī)等。勵磁方式有勵磁機(jī)、電機(jī)擴(kuò)大機(jī)、磁放大器和晶閘管勵磁裝置等。控制方式有繼電器一接觸器、磁放大器和半導(dǎo)體控制裝置等輸出電流無脈動,帶飛輪的機(jī)組對沖擊負(fù)載有緩沖作用,采用同步電動機(jī)的機(jī)組能提供無功功率,改善功率因數(shù)。因有旋轉(zhuǎn)機(jī)組,效率較低,噪聲、振動大。控制功率大,構(gòu)成閉環(huán)系統(tǒng)一般動態(tài)指標(biāo)較差,用晶閘管勵磁可提高動態(tài)指標(biāo)。此種方法已很少采用晶閘管變流器包括變流變
42、壓器、晶閘管變流裝置、平波電抗器和半導(dǎo)體控制裝置等效率高,噪聲、振動小,控制功率小,構(gòu)成閉環(huán)系統(tǒng)動態(tài)指標(biāo)好。但輸出電流有脈動,深控時功率因數(shù)低,對電網(wǎng)的沖擊和高次諧波影響大174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 3.直流電動機(jī)的調(diào)速方案比較直流電動機(jī)的調(diào)速方案比較表2341 直流電動機(jī)改變電壓調(diào)速的方法變壓方法變壓方法原理電路原理電路裝置組成裝置組成性能及適用場合性能及適用場合直流斬波器包括晶閘管(或其他電力電子器件)、換相電感電容、輸入濾波電感電容及半導(dǎo)體控制裝置等柴油交流發(fā)電機(jī)一硅整流器柴油交流發(fā)電機(jī)、硅整流裝置及相應(yīng)的控制裝置等
43、改變交流發(fā)電機(jī)電壓,經(jīng)硅整流裝置整流得到可變直流電壓,用于電動輪車等獨(dú)立電源場合適用于由公共直流電源或蓄電池及恒定電壓直流電源供電的場合,如電機(jī)車、蓄電池車等電動車輛174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 3.直流電動機(jī)的調(diào)速方案比較直流電動機(jī)的調(diào)速方案比較表1741 直流電動機(jī)改變電壓調(diào)速的方法變壓方法變壓方法原理電路原理電路裝置組成裝置組成性能及適用場合性能及適用場合交流調(diào)壓器、硅整流器 調(diào)壓變壓器、硅整流裝置等 升壓機(jī)組 與公共直流電源串聯(lián)的直流發(fā)電機(jī)或晶閘管變流裝置及相應(yīng)的控制裝置 適用于公共直流電源供電場合,設(shè)備較經(jīng)濟(jì),但調(diào)
44、速范圍不大 效率高,噪聲、振動小,輸出電流脈動較小,比晶閘管供電功率因數(shù)有改善,但實(shí)現(xiàn)自動調(diào)速較困難。適用于不經(jīng)常調(diào)速的小功率(15kw)手動開環(huán)控制場合 174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 3.直流電動機(jī)的調(diào)速方案直流電動機(jī)的調(diào)速方案4)改變磁通調(diào)速)改變磁通調(diào)速在電動機(jī)勵磁回路中,改變其串聯(lián)電阻在電動機(jī)勵磁回路中,改變其串聯(lián)電阻Rf的大小或采的大小或采用專門的勵磁調(diào)節(jié)器來控制勵磁電壓,都可以改變勵用專門的勵磁調(diào)節(jié)器來控制勵磁電壓,都可以改變勵磁電流和磁通。磁電流和磁通。ICRCUTCCRCUneeNTeeN2174 交、直流電
45、動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 3.直流電動機(jī)的調(diào)速方案直流電動機(jī)的調(diào)速方案4)改變磁通調(diào)速)改變磁通調(diào)速機(jī)械特性曲線和速度曲線如圖機(jī)械特性曲線和速度曲線如圖以上三種調(diào)速方式的性能比較見表23-42表23-42174 交、直流電動機(jī)調(diào)速技術(shù)交、直流電動機(jī)調(diào)速技術(shù)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 4.常見的直流電動機(jī)調(diào)速系統(tǒng)常見的直流電動機(jī)調(diào)速系統(tǒng)(1)斬波器調(diào)速系統(tǒng))斬波器調(diào)速系統(tǒng)T斬波周期, TtONt OFF ; 工作率, = tONT 。a. 恒頻系統(tǒng)。T保持不變(即頻率不變),只改變tON,即脈寬調(diào)制(PWM)方式。b.
46、變頻系統(tǒng)。改變T(即改變頻率),但同時保持tON不變或者保持tOFF不變,即頻率調(diào)制(FM)方式。斬波器是一種電力電子開斬波器是一種電力電子開關(guān),它能從恒定的直流電關(guān),它能從恒定的直流電源產(chǎn)生出經(jīng)過斬波的可變源產(chǎn)生出經(jīng)過斬波的可變直流電壓,從而達(dá)到調(diào)速直流電壓,從而達(dá)到調(diào)速的目的。圖示為一個簡單的目的。圖示為一個簡單的斬波器調(diào)速系統(tǒng)和斬波的斬波器調(diào)速系統(tǒng)和斬波后的電壓波形。后的電壓波形。1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 4.常見的直流電動機(jī)調(diào)速系統(tǒng)常見的直流電動機(jī)調(diào)速系統(tǒng)(1)斬波器調(diào)速系統(tǒng))斬波器調(diào)速系統(tǒng)圖1749 多象限運(yùn)行的斬波器調(diào)速系統(tǒng) a)二象限運(yùn)行 b)四象限運(yùn)行 c)采用IGBT的四象限運(yùn)行系統(tǒng)1741 直流電動機(jī)調(diào)速技術(shù)直流電動機(jī)調(diào)速技術(shù) 4.常見的直流電動機(jī)調(diào)速系統(tǒng)常見的直流電動機(jī)調(diào)速系統(tǒng)(1)斬波器調(diào)速系統(tǒng))斬波器調(diào)速系統(tǒng)圖1749
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯(lián)系上傳者。文件的所有權(quán)益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網(wǎng)頁內(nèi)容里面會有圖紙預(yù)覽,若沒有圖紙預(yù)覽就沒有圖紙。
- 4. 未經(jīng)權(quán)益所有人同意不得將文件中的內(nèi)容挪作商業(yè)或盈利用途。
- 5. 人人文庫網(wǎng)僅提供信息存儲空間,僅對用戶上傳內(nèi)容的表現(xiàn)方式做保護(hù)處理,對用戶上傳分享的文檔內(nèi)容本身不做任何修改或編輯,并不能對任何下載內(nèi)容負(fù)責(zé)。
- 6. 下載文件中如有侵權(quán)或不適當(dāng)內(nèi)容,請與我們聯(lián)系,我們立即糾正。
- 7. 本站不保證下載資源的準(zhǔn)確性、安全性和完整性, 同時也不承擔(dān)用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 暑假前安全教育演講稿(17篇)
- 重慶三峰環(huán)境集團(tuán)股份有限公司招聘考試真題2024
- 天津市社會工作發(fā)展服務(wù)中心招聘考試真題2024
- 2024年北京積水潭醫(yī)院貴州醫(yī)院筆試真題
- 學(xué)校消防巡查管理制度
- 嵌入式產(chǎn)品開發(fā)的設(shè)計思路試題及答案
- 商品房租賃合同范文(17篇)
- 行政效率提升的實(shí)踐策略試題及答案
- 成套配電箱采購合同
- 戶外廣告合同書(15篇)
- 職務(wù)轉(zhuǎn)讓協(xié)議書范本
- 蘭州大學(xué)博士英語考試試題及答案
- 《ISO 37001-2025 反賄賂管理體系要求及使用指南》專業(yè)解讀和應(yīng)用培訓(xùn)指導(dǎo)材料之2:4組織環(huán)境(雷澤佳編制-2025A0)
- 2025年SAT語法沖刺備考:真題解析與模擬試題卷
- 油封包裝工培訓(xùn)
- 人形機(jī)器人行業(yè)未來發(fā)展?jié)摿εc趨勢展望
- 2025年中考地理熱點(diǎn)素材題(含答案)
- 防恐防暴安全班會課件
- 2024年貴州省貴陽市觀山湖區(qū)中考二模物理試題(含答案)
- 工匠精神概述課件
- 國家安全教育大學(xué)生讀本課件高教2024年8月版課件-第七章堅持以軍事、科技、文化、社會安全為保障
評論
0/150
提交評論