


已閱讀5頁,還剩23頁未讀, 繼續免費閱讀
版權說明:本文檔由用戶提供并上傳,收益歸屬內容提供方,若內容存在侵權,請進行舉報或認領
文檔簡介
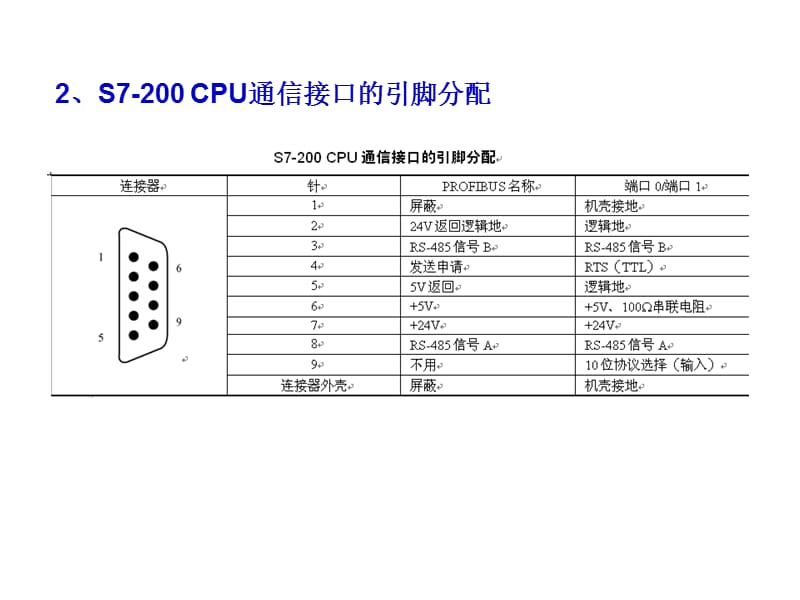
第8講PLC通過USS協議網絡控制變頻器的運行,一、USS通信及硬件連接,二、USS協議專用指令,三、PLC通過USS協議網絡控制變頻器的運行,一、USS通信及硬件連接,1、使用USS協議的優點使用USS協議的優點如下:(1)USS協議對硬件設備要求低,減少了設備之間布線的數量。(2)無需重新布線就可以改變控制功能。(3)可通過串行接口設置來修改變頻器的參數。(4)可連續對變頻器的特性進行監測和控制。(5)利用S7-200CPU組成USS通信的控制網絡具有較高的性價比。,2、S7-200CPU通信接口的引腳分配,3、USS通信硬件連接,(1)通信注意事項a、條件許可的情況下,USS主站盡量選用直流型的CPU。當使用交流型的CPU22X和單相變頻器進行USS通信時,CPU22X和變頻器的電源必須接成同相位的。b、一般情況下,USS通信電纜采用雙絞線即可,如果干擾比較大,可采用屏蔽雙絞線。c、在采用屏蔽雙絞線作為通信電纜時,把具有不同電位參考點的設備互聯后在連接電纜中形成不應有的電流,這些電流導致通信錯誤或設備損壞。要確保通信電纜連接的所有設備公用一個公共電路參考點,或是相互隔離以防止干擾電流產生。屏蔽層必須接到外殼地或9針連接器的1腳上。,d、盡量采用較高的波特率,通信速率只與通信距離有關,與干擾沒有直接關系。e、終端電阻的作用是用來防止信號反射的,并不用來抗干擾。如果通信距離很近,波特率較低或點對點的通信情況下,可不用終端電阻。f、不要帶電插拔通信電纜,尤其是正在通信過程中,這樣極易損壞傳動裝置和PLC的通信端口。,(2)S7-200與MM440變頻器的連接將MM440的通信端子為P+(29)和N-(30)分別接至S7-200通信口的3號與8號針即可。,二、USS協議專用指令,使用USS指令,首先要安裝指令庫,正確安裝結束后,打開指令樹中的“庫”項,出現多個USS協議指令,如圖所示,且會自動添加一個或幾個相關的子程序。,1、USS_INT指令,(1)僅限為通信狀態的每次改動執行一次USS_INIT指令。使用邊緣檢測指令,以脈沖方式打開EN輸入。欲改動初始化參數,執行一條新的USS_INIT指令。(2)“Mode”輸入數值選擇通信協議:輸入值1將端口分配給USS協議,并啟用該協議;輸入值0將端口分配給PPI,并禁止USS協議。(3)“Baud”將波特率設為1200、2400、4800、9600、19200、38400、57600或115200。(4)“Active”表示激活驅動器。某些驅動器僅支持地址031。每一位對應一臺變頻器,如圖22-3所示。如第0位為1表示激活0號變頻器,激活的變頻器自動地被輪詢,以控制其運行和采集其狀態。,。,2、USS_CTRL,USS_CTRL指令用于控制處于激活狀態的變頻器,每臺變頻器只能使用一條該指令。,指令說明:(1)USS_CTRL(端口0)或USS_CTRL_P1(端口1)指令被用于控制ACTIVE(激活)驅動器。USS_CTRL指令將選擇的命令放在通信緩沖區中,然后送至編址的驅動器DRIVE(驅動器)參數,條件是已在USS_INIT指令的ACTIVE(激活)參數中選擇該驅動器。(2)僅限為每臺驅動器指定一條USS_CTRL指令。,(3)某些驅動器僅將速度作為正值報告。如果速度為負值,驅動器將速度作為正值報告,但逆轉D_Dir(方向)位。(4)EN位必須為ON,才能啟用USS_CTRL指令。該指令應當始終啟用。(5)RUN表示驅動器是ON還是OFF。當RUN(運行)位為ON時,驅動器收到一條命令,按指定的速度和方向開始運行。為了使驅動器運行,必須符合以下條件:1)DRIVE(驅動器)在USS_INIT中必須被選為ACTIVE(激活)。2)OFF2和OFF3必須被設為0。3)Fault(故障)和Inhibit(禁止)必須為0。,(6)當RUN為OFF時,會向驅動器發出一條命令,將速度降低,直至電動機停止。OFF2位被用于允許驅動器自由降速至停止。OFF2被用于命令驅動器迅速停止。(7)Resp_R(收到應答)位確認從驅動器收到應答。對所有的激活驅動器進行輪詢,查找最新驅動器狀態信息。每次S7-200從驅動器收到應答時,Resp_R位均會打開,進行一次掃描,所有數值均被更新。(8)F_ACK(故障確認)位被用于確認驅動器中的故障。當F_ACK從0轉為1時,驅動器清除故障。(9)DIR(方向)位用來控制電動機轉動方向。(10)Drive(驅動器地址)輸入是MicroMaster驅動器的地址,向該地址發送USS_CTRL命令。有效地址:031。,(11)Type(驅動器類型)輸入選擇驅動器的類型。將MicroMaster3(或更早版本)驅動器的類型設為0,將MicroMaster4驅動器的類型設為1。(12)Speed_SP(速度設定值)是作為全速百分比的驅動器速度。Speed_SP的負值會使驅動器反向旋轉方向,其范圍為-200.0%200.0%。(13)“Fault”表示故障位的狀態(0無錯誤,1有錯誤),驅動器顯示故障代碼(有關驅動器信息,請參閱用戶手冊)。欲清除故障位,糾正引起故障的原因,并打開F_ACK位。,(14)Inhibit表示驅動器上的禁止位狀態(0不禁止,1禁止)。欲清除禁止位,故障位必須為OFF,運行、OFF2和OFF3輸入也必須為OFF。(15)D_Dir表示驅動器的旋轉方向。(16)Run_EN(運行啟用)表示驅動器是在運行(1)還是停止(0)。(17)Speed是以全速百分比表示的驅動器速度,其范圍為:-200.0%200.0%。(18)Staus是驅動器返回的狀態字原始數值。,(19)Error是一個包含對驅動器最新通信請求結果的錯誤字節。USS指令執行錯誤主題定義了可能因執行指令而導致的錯誤條件。(20)Resp_R(收到的響應)位確認來自驅動器的響應。對所有的激活驅動器都要輪詢最新的驅動器狀態信息。每次S7-200接收到來自驅動器的響應時,每掃描一次,Resp_R位就會接通一次并更新所有相應的值。,3、USS_RPM,USS_RPM指令用于讀取變頻器的參數,USS協議有3條讀指令:(1)USS_RPM_W指令讀取一個無符號字類型的參數。(2)USS_RPM_D指令讀取一個無符號雙字類型的參數。(3)USS_RPM_R指令讀取一個浮點數類型的參數。,指令說明:(1)一次僅限將一條讀取(USS_RPM_x)或寫入(USS_WPM_x)指令設為激活。(2)EN位必須為ON,才能啟用請求傳送,并應當保持ON,直至設置“完成”位,表示進程完成。例如,當XMT_REQ輸入為ON,在每次掃描時向MicroMaster傳送一條USS_RPM_x請求。因此,XMT_REQ輸入應當通過一個脈沖方式打開。(3)“Drive”輸入是MicroMaster驅動器的地址,USS_RPM_x指令被發送至該地址。單臺驅動器的有效地址是031。(4)“Param”是參數號碼。“Index”是需要讀取參數的索引值。“數值”是返回的參數值。必須向DB_Ptr輸入提供16個字節的緩沖區地址。該緩沖區被USS_RPM_x指令用于存儲向MicroMaster驅動器發出的命令結果。(5)當USS_RPM_x指令完成時,“Done”輸出ON,“Error”輸出字節和“Value”輸出包含執行指令的結果。“Error”和“Value”輸出在“Done”輸出打開之前無效。,4、USS_WPM,USS_WPM指令用于寫入變頻器的參數,USS協議共有3種寫入指令:(1)USS_WPM_W(端口0)或USS_WPM_W_P1(端口1)指令寫入不帶符號的字參數。(2)USS_WPM_D(端口0)或USS_WPM_D_P1(端口1)指令寫入不帶符號的雙字參數。(3)USS_WPM_R(端口0)或USS_WPM_R_P1(端口1)指令寫入浮點。,指令說明:(1)一次僅限將一條讀取(USS_RPM_x)或寫入(USS_WPM_x)指令設為激活。(2)當MicroMaster驅動器確認收到命令或發送一則錯誤條件時,USS_WPM_x事項完成。當該進程等待應答時,邏輯掃描繼續執行。(3)EN位必須為ON,才能啟用請求傳送,并應當保持打開,直至設置“Done”位,表示進程完成。例如,當XMT_REQ輸入為ON,在每次掃描時向MicroMaster傳送一條USS_WPM_x請求。因此,XMT_REQ輸入應當通過一個脈沖方式打開。(4)當驅動器打開時,EEPROM輸入啟用對驅動器的RAM和EEPROM的寫入,當驅動器關閉時,僅啟用對RAM的寫入。請注意,該功能不受MM3驅動器支持,因此該輸入必須關閉。(5)其他參數的含義及使用方法參考USS_RPM指令。,三、PLC通過USS協議網絡控制變頻器的運行,1、項目要求S7-200PLC通過USS協議網絡控制MicroMasterMM440變頻器,控制電動機的啟動、制動停止、自由停止和正反轉,并能夠通過PLC讀取變頻器參數、設置變頻器參數。,2、變頻器的設置,在將變頻器連至S7-200之前,必須確保變頻器具有以下系統參數,即使用變頻器上的基本操作面板的按鍵設置參數。(1)復位為出廠默認設置值(可選):P0010=30(出廠的設定值),P0970=1(參數復位)。(2)如果忽略該步驟,確保以下參數的設置:P2012=USS的PZD長度。常規的PZD長度是2個字長。這一參數允許用戶選擇不同的PZD長度,以便對目標進行控制和監測。例如,3個字的PZD長度時,可以有第2個設定值和實際值。實際值可以是變頻器的輸出電流(P2016或P2019下標3=r0027)。P2013=USS的PKW長度。默認值設定為127(可變長度)。也就是說,被發送的PKW長度是可變的,應答報文的長度也是可變的,這將影響USS報文的總長度。如果要寫一個控制程序,并采用固定長度的報文,那么,應答狀態字(ZSW)總是出現在同樣的位置。MicroMaster4變頻器最常用的PKW固定長度是4個字長,因為它可以讀寫所有的參數。,(3)設置電動機參數如下:1)P0003=3,用戶訪問級為專家級,使能讀/寫所有參數。2)P0010=調試參數過濾器,=1快速調試,=0準備。3)P0304=電動機額定電壓(以電動機銘牌為準)。4)P0305=電動機額定電流(以電動機銘牌為準)。5)P0307=電動機額定功率(以電動機銘牌為準)。6)P0308=電動機額定功率因數(以電動機銘牌為準)。7)P0310=電動機額定頻率(以電動機銘牌為準)。8)P0311=電動機額定速度(以電動機銘牌為準)。,(4)設置本地/遠程控制模式。1)P0700=5,通過COM鏈路(經由RS485)進行通信的USS設置,即通過USS對變頻器進行控制。2)P1000=5,這一設置可以允許通過COM鏈路的USS通信發送頻率設定值。(5)設置RS-485串口USS波特率:P2010在不同值有不同的波特率,即P2010=4(2400b/s);P2010=5(4800b/s);P2010=6(9600b/s);P2010=7(19200b/s);P2010=8(38400b/s);P2010=9(57600b/s);這一參數必須與PLC主站采用的波特率相一致,如本項目中PLC和變頻器的波特率都設為9600b/s。(6)輸入從站地址。P2011=USS節點地址(031),這是為變頻器指定的唯一從站地址。,(7)斜坡上升時間(可選):P1120=0650.00,這是一個以秒(s)為單位的時間,在這個時間內,電動機加速到最高頻率。(8)斜坡下降時間(可選):P1121=0650.00,單位為秒(s),在這個時間內,電動機減速到完全停止。(9)設置串行鏈接參考頻率:P2000=1650,單位為Hz,默認值為50。(10)設置USS的規格化:P2009=USS規格化(具有兼容性)。設置值為0時,根據P2000的基準頻率進行頻率設定值的規格化。設置值為1時,允許設定值以絕對十進制數的形式發送。如在規格化時設置基準頻率為50.00Hz,則所對應的十六進制數是4000,十進制數值是16384。,(11)P2016和P2019:允許用戶確定,在RS-232C和RS-485串行接口的情況下,答應報文PZD中應該返回哪些狀態字和實際值,其
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯系上傳者。文件的所有權益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網頁內容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經權益所有人同意不得將文件中的內容挪作商業或盈利用途。
- 5. 人人文庫網僅提供信息存儲空間,僅對用戶上傳內容的表現方式做保護處理,對用戶上傳分享的文檔內容本身不做任何修改或編輯,并不能對任何下載內容負責。
- 6. 下載文件中如有侵權或不適當內容,請與我們聯系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 荊州市沉井施工方案
- 自然資源科課件
- 江蘇城鄉建設職業學院《文學理論與文學研究》2023-2024學年第一學期期末試卷
- 內蒙古民族幼兒師范高等專科學校《食品生物技術概論》2023-2024學年第二學期期末試卷
- 石家莊工程職業學院《混凝土基本構件》2023-2024學年第二學期期末試卷
- 沈陽農業大學《園林建筑設計Ⅱ》2023-2024學年第二學期期末試卷
- 揭陽職業技術學院《分鏡腳本創作》2023-2024學年第二學期期末試卷
- 建東職業技術學院《形態學實驗Ⅲ》2023-2024學年第二學期期末試卷
- 四川衛生康復職業學院《成癮醫學》2023-2024學年第二學期期末試卷
- 襄陽科技職業學院《矩陣理論》2023-2024學年第二學期期末試卷
- GB/T 27060-2025合格評定良好實踐指南
- 2025年國家電投集團內蒙古能源有限公司招聘筆試參考題庫含答案解析
- 2025年保安證考試常見試題與答案
- 2024年四川眉山中考滿分作文《時光剪影中的那抹溫柔》
- 血液灌流治療與護理
- 滬科版七年級下冊數學期中考試題(附答案)
- 2024年河南煙草行業招聘筆試真題
- 《食管癌講》課件
- 高分子化學6-離子聚合-陰離子聚合
- 2025版無人機生產加工委托合同3篇
- 軍事法規基礎知識
評論
0/150
提交評論