



版權說明:本文檔由用戶提供并上傳,收益歸屬內容提供方,若內容存在侵權,請進行舉報或認領
文檔簡介
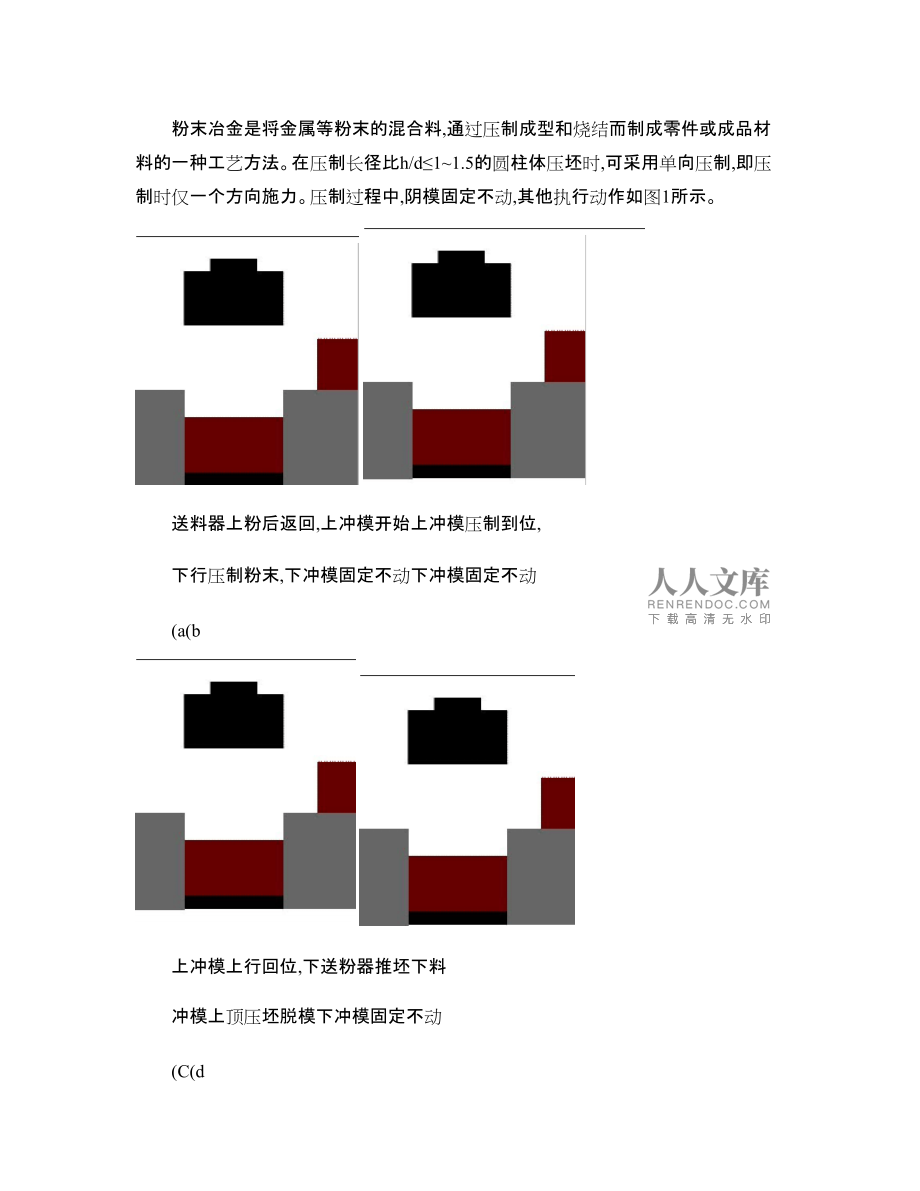
1、目錄一、課題- 02二、機構總體設計- 03三、機構具體設計3.1上沖模機構設計- 043.2脫模機構設計- 213.3送粉機構設計- 46四、機構動力設計- 80五、參考文獻- 82課題:粉末成形壓機一.工作原理及工藝動作過程粉末冶金是將金屬等粉末的混合料,通過壓制成型和燒結而制成零件或成品材料的一種工藝方法。在壓制長徑比h/d11.5的圓柱體壓坯時,可采用單向壓制,即壓制時僅一個方向施力。壓制過程中,陰模固定不動,其他執行動作如圖1所示。 送料器上粉后返回,上沖模開始上沖模壓制到位,下行壓制粉末,下沖模固定不動下沖模固定不動(a(b 上沖模上行回位,下送粉器推坯下料沖模上頂壓坯脫模下沖模固
2、定不動(C(d 送粉器到位后上料準備回位下沖模下行回位,準備循環(e二.設計要求1.上沖模壓制機構應具有以下的運動特性:快速接近粉料,慢速等速壓制,壓制到位后停歇片刻(約0.4秒左右保壓或接近壓制行程終點時再放慢而幾道保壓作用。2.脫模機構應使下沖模頂出距離準確,復位時要求速度快而沖擊小。3.送粉機構要嚴格遵守壓制周期的運動規律。4.進一步要求:讓上沖模和下沖模的行程可調。三. 主要技術要求1每分鐘壓制次數為1040次; 2.壓坯最大直徑為45mm;3.上沖模最大行程為110mm;4.送粉器行程為115mm;5.脫模最大行程為45mm;6.壓制及脫模能力最大為58KN;一:機構總體設計成型壓機
3、的總體設計如圖一所示。該成型壓機包括三個機構:上沖模機構、下沖模機構(脫模機構、送粉機構。 圖 1上沖模機構由一個曲柄搖桿機構(1、2、3和一個三桿滑塊機構(3、4、5并聯,其功能是:曲柄1做回轉運動,帶動搖桿3在一定范圍內擺動,并且具有急回特性。搖桿3與連桿4鉸接,進而帶動沖頭5做直線運動。上沖模在沖壓完成后停歇0.30.4S,之后有一個急回過程。脫模機構由下沖模即推桿與圓盤凸輪組成。其功能是:在凸輪停歇,上沖模做沖壓動作時凸輪與推桿不接觸,此時推桿由機架拖住。這樣,在沖壓過程中推桿上受到的壓力就不會作用到凸輪上。脫模機構能使下沖模頂出距離準確。回程(復位時速度快而沖擊小。送粉機構由一個滾子
4、擺桿偏心圓盤機構與一個搖桿滑塊機構串聯而成。其功能是:具有間歇送料和急回特性送料的同時將已壓制好的坯送離工作區域二.機構具體設計(1上沖模機構設計:設計選定L CD =L BC =L4=200mm,上沖模的行程為100mm。即構件2,3,4的長度均為200mm。先對曲柄搖桿機構進行作圖分析: 圖 21.假定CD桿運動到豎直位置時,AB桿與BC桿恰好共線,且此時BC與水平方向的夾角為30°。BC與B”C”分別是BC桿運動的兩個極限位置。進而計算出桿CD的擺動角為41.4°計算得C”CD=69.3°。則C”CB=30°+C”CD-90°=9.3&#
5、176;AB與BC共線,A鉸鏈的位置在直線B”C”上,現假設L AB =X,則有AC=200+X。還有AB”與B”C”重合,則AC”=200-X。進而由余弦定理得:COSC”CB=(200+X2+2002-(200-X2/2x100x1.414(200+X解得X=68.78mm即曲柄1的長度約等于68.8mm。進一步計算其機位夾角 =9.97°,即其機位夾角約等于10°,從而得該機構的行程速比系數K=1.17。最后得到的上沖模機構簡圖如下圖三。 圖 32.現對進行運動分析: 圖 4計算得L AD=242mm、L AE=L AB+L BC=268.8mm、AD與水平線的夾角為
6、15.77°3.現以AD為基準進行機構的運動分析:f(2,3=(L BC cos2 +L CD cos3 (L AD+L AB cos1 f2(2,3=(L CD sin3 L BC sin2 L AB sin1該方程組的雅克比矩陣為J:L BC sin2 -L CD sin3J= -L BC cos2 L CD cos3接著進行MATLAB編程,對機構的運動進行分析:位移分析:原函數:function y=rrrposi(x%script used to implement Newton-Raphson mechod for%solving nonlinear position o
7、f RRR bar group%Input parameters%x(1=theta-1%x(2=theta-2 guess value%x(3=theta-3 guess value%x(4=LAB%x(5=LBC%x(6=LCD%x(7=LAD%Output parameters%y(2=theta-2%y(3=theta-3%y(4=theta-4%theta2=x(2;theta3=x(3;%epsilon=1.0E-6;%f=x(5*cos(theta2+x(6*cos(theta3-x(7-x(4*cos(x(1; x(6*sin(theta3-x(5*sin(theta2-x(4
8、*sin(x(1;%while norm(f>epsilonJ=-x(5*sin(theta2 -x(6*sin(theta3;-x(5*cos(theta2 x(6*cos(theta3;dth=inv(J*(-1.0*f;theta2=theta2+dth(1;theta3=theta3+dth(2;f=x(5*cos(theta2+x(6*cos(theta3-x(7-x(4*cos(x(1;x(6*sin(theta3-x(5*sin(theta2-x(4*sin(x(1; norm(f;end;y(1=theta2;y(2=theta3;主程序:clcclearx1=linsp
9、ace(0,2*pi,180;x=zeros(length(x1,7;for n=1:180x(n,:=x1(:,n 40*pi/180 55*pi/180 68.8 200 200 242;endp=zeros(length(x1,2;for k=1:180y= shangchongm(x(k,:;p(k,:=y;end得到P矩陣。得到的P矩陣的第二列是3在曲柄1轉過360°的過程中對應各個位置的值。得搖桿與豎直線的夾角矩陣為q=90-p(:,1'*(180/pi-15.77。輸出圖像: 圖 5上沖模的行程方程為:X= 2x200xcosq-300輸出上沖模行程隨1 擺動角
10、度變化的圖像: 圖 6分析上沖模的行程圖像可知,上沖模在一個周期內約有0.33S的停歇時間。接下來分析機構運動的加速度:f1(2,3=(L BC cos2 +L CD cos3 (L AD+L AB cos1 f2(2,3=(L CD sin3L BC sin2 L AB sin1對時間t求導數得到:-2L BC Sin2-3L CD Sin3=-1L AB Sin13L CD Cos3-2L BC Cos2=1L AB Cos1 -L BC Sin 2 -L CD Sin32 -L BC Cos 2 L CD Cos33-L AB Sin1=1L AB Cos 11=2/=rad/s再次求導
11、數得到:-2L BC Sin2-22L BC Cos2-3L CD Sin3-32L CD Cos3=-12L AB Cos 13L CD Cos3-32L CD Sin3-2L BC Cos2+22L BC Sin2=-12L AB Sin 1 -L BC Sin 2 -L CD Sin 3 2 =L CD Cos 3 -L BC Cos 2 31L AB Cos 1 2L BC Cos 2 3L CD Cos 3 12-1L AB Sin 1 -2L BC Sin 2 3L CD Sin 3 3依據速度方程和加速度方程進行MATLAB編程。速度分析:主函數:function y=scmve
12、l(x%Input parameters%x(1=theta-1%x(2=theta-2%x(3=theta-3%x(4=dtheta-1%x(5=LAB%x(6=LBC%x(7=LCD%x(8=LDA%Outout parameters%y(1=dtheta-2%y(2=dtheta-3%A=-x(6*sin(x(2 -x(7*sin(x(3;-x(6*cos(x(2 x(7*cos(x(3;B=-x(5*sin(x(1;x(5*cos(x(1*x(4;y=inv(A*B;主程序:>> x2=x1' p(:,1 p(:,2 pi*ones(180,1 68.8*ones(
13、180,1 200*ones(180,1.200*ones(180,1 242*ones(180,1;>> m=zeros(2,180;>> for k=1:180y2=scmvel(x2(k,:;m(:,k=y2;end得到的m矩陣的第二行是CD桿的角速度進一步輸出CD桿角速度圖像: 圖7 上沖模的速度函數V=-W3x400xsin 3輸出上沖模速度圖像: 圖 8求加速度:主函數:function y=scma(x%Input parameters%x(1=theta-1%x(2=theta-2%x(3=theta-3%x(4=dtheta-1%x(5=dtheta-
14、2%x(6=dtheta-3%x(7=LAB%x(8=LBC%x(9=LCD%x(10=LAD%Outout parameters%y(1=a2%y(2=a3%A=-x(8*sin(x(2 -x(9*sin(x(3;x(9*cos(x(3 -x(8*cos(x(2;B=-x(4*x(7*cos(x(1 x(5*x(8*cos(x(2x(6*x(9*cos(x(3;-x(4*x(7*sin(x(1 -x(5*x(8*sin(x(2x(6*x(9*sin(x(3;C=x(4;x(5;x(6;y=inv(A*B*C;主程序:>> x3=x1' p(:,1 p(:,2 pi*one
15、s(180,1 m(1,:' m(2,:' 0.0688*ones(180,1.0.200*ones(180,1 0.200*ones(180,1 0.242*ones(180,1;>> n=zeros(2,180;for k=1:180y3=scma(x3(k,:;n(:,k=y3;end得到的n矩陣的第二行是CD桿的角加速度。輸出桿CD運動的角加速度圖像: 圖9上沖模加速度:>> A=zeros(1,180;>> for k=1:180A(k=-0.4*n(2,k*sin(p(k,2-0.4*m(2,k2*cos(p(k,2;end輸出上
16、沖模加速度圖像: 圖10整理數據列表: (2脫模機構設計:這里運用Camtrax 軟件對凸輪進行設計。由第一步對上沖模機構的設計列出三個機構協調運動的時間表: 現依據表一進行脫模機構的凸輪設計。凸輪的動作時間分布為:(周期為2S0.5s1.5s:推桿懸空(掛在機架上,保持行程S=01.6s1.9s:推桿以擺線規律(cycloidal上頂40mm,使推桿加速度過度平穩,沒有沖擊2.0s0.1s:推桿保持S=40mm0.2s0.4s:推桿以擺線規律(cycloidal急回,速度快,無沖擊具體設計陰模及推桿尺寸設計,如圖: 圖 11機構為滾子對心直動推桿圓盤凸輪依據上述行程分析在Camtrax輸入運
17、動信息: 圖 12利用Camtrax 軟件不斷對凸輪進行優化設計,既要保證運動規律,使凸輪的壓力角滿足a=30°,又使推桿運動無沖擊,并使機構盡量緊湊。最終選定凸輪基圓半徑為r0=130mm,滾子半徑為rr=30mm。設定凸輪運動周期為2S。運行軟件,畫出凸輪輪廓圖: 圖 13 輸出推桿運動規律圖像: 圖 14 輸出推桿運動速度圖像: 圖 15輸出推桿運動加速度圖像: 圖16 輸出凸輪各個位置的壓力角圖像: 圖17分析圖15和圖16可知該凸輪在運動過程中加速度過度平穩,無沖擊,并且壓力角滿足設計要求。SolidWorks建模結果如圖: 圖18輸出該凸輪的各項數據列表: 2.機構為平底
18、推桿直動對心圓盤凸輪依據上述行程分析在Camtrax輸入運動信息: 圖19利用Camtrax 軟件不斷對凸輪進行優化設計,既要保證運動規律,使凸輪的壓力角滿足a=30°,又使推桿運動無沖擊,并使機構盡量緊湊,凸輪輪廓不出現失真。最終選定凸輪基圓半徑為r=180mm,導軌長度L=100mm。設定凸輪運動周期為2S。運行軟件,畫出凸輪輪廓圖: 圖20輸出推桿運動規律圖像: 圖21輸出推桿運動速度圖像: 圖22 輸出推桿運動加速度圖像: 圖23分析圖21可知該凸輪在運動過程中加速度過度平穩,無沖擊。輸出該凸輪各項數據。 分析比較兩個形式的凸輪都能滿足運動及功能要求,但是比較兩者的基本尺寸發
19、現平底推桿對心直動圓盤凸輪的基圓半徑要180mm才能滿足功能及力學要求,但是滾子推桿對心直動圓盤凸輪在滿足相同功能及力學要求是所需的最小基圓半徑只要130mm。從機構尺寸,緊湊的角度考慮,脫模機構選用滾子推桿對心直動圓盤凸輪,即第一種設計方案。(3送粉機構設計: 圖24該機構由擺動推桿凸輪機構與搖桿滑塊機構串聯而成。機構設計尺寸:擺動推桿L3=30mm、搖桿L4=200mm、連桿L5=400mm、擺桿3與機架鉸接的位置和連桿與料斗鉸接的位置在同一條水平線上,且鉸鏈A 到陰模中心線的距離L=500mm。料斗的寬度d=60mm。滾子半徑r r=15mm。搖桿L4與擺動推桿L3固連在一起,兩桿成90
20、°夾角。由料斗的運動規律來設計連桿機構主動件的角度擺動規律,進而設計擺桿凸輪的運動規律。考慮料斗運動與上沖模機構以及脫模機構運動的協調,先設計其運動規律如下:00.4s:料斗停在陰模口的正上方,進行加粉。此時連桿AB與水平線的夾角為49.46°。此時對應的擺動推桿L3與水平線的夾角為40.54°。0.50.6s:料斗在這個時間段有一個急回動作,急回一個料斗的寬度即60mm。連桿機構運動到ABC處時,AB桿與水平線的夾角為65.28°。此時對應的擺動推桿L3與水平線的夾角為24.72°,即在這段時間內,擺動推桿的擺角從40.54°減小到24.72°,為保證運動加速度的平穩,這段時間凸輪運動規律我們設計為擺線運動規律(cycloidal。0.70.9s:料斗在這段時間內繼續做回程運動,回程60mm,相比于過程這個時間段經歷比較長。連桿機構運動到AB”C”處時,AB
溫馨提示
- 1. 本站所有資源如無特殊說明,都需要本地電腦安裝OFFICE2007和PDF閱讀器。圖紙軟件為CAD,CAXA,PROE,UG,SolidWorks等.壓縮文件請下載最新的WinRAR軟件解壓。
- 2. 本站的文檔不包含任何第三方提供的附件圖紙等,如果需要附件,請聯系上傳者。文件的所有權益歸上傳用戶所有。
- 3. 本站RAR壓縮包中若帶圖紙,網頁內容里面會有圖紙預覽,若沒有圖紙預覽就沒有圖紙。
- 4. 未經權益所有人同意不得將文件中的內容挪作商業或盈利用途。
- 5. 人人文庫網僅提供信息存儲空間,僅對用戶上傳內容的表現方式做保護處理,對用戶上傳分享的文檔內容本身不做任何修改或編輯,并不能對任何下載內容負責。
- 6. 下載文件中如有侵權或不適當內容,請與我們聯系,我們立即糾正。
- 7. 本站不保證下載資源的準確性、安全性和完整性, 同時也不承擔用戶因使用這些下載資源對自己和他人造成任何形式的傷害或損失。
最新文檔
- 婚姻忠誠協議中房產居住權保留及競業限制合同
- 抖音火花品牌挑戰賽參賽選手參賽費用報銷合同
- 新能源技術專利授權與生產流程優化合同
- 高端私人游艇碼頭設施保養與維修全面補充協議
- 智能化泵站遠程運維與設備故障預警服務合同
- 互聯網專利交叉許可及數據中心租賃合作協議
- 智能家居環境監測系統軟件租賃與智能遠程監控服務合同
- 旅游廣告創意策劃制作與傳播服務協議
- 《宇航學報》投稿須知官方認證
- 娛樂公司主管年終總結模版
- 湖北省武漢市2025屆高中畢業生四月調研考試地理試題及答案(武漢四調)
- 海南瓊海市旅游健康文化發展有限公司招聘筆試題庫2025
- 2025-2030中國具身智能行業研發創新策略與未來前景展望研究報告
- 2024年-GIS考試復習題庫(含答案)
- 教師語言與溝通藝術知到智慧樹章節測試課后答案2024年秋溫州大學
- 《基于EVA的科大訊飛企業價值評估的計算過程及結果探析案例報告》10000字(論文)
- 空氣輸送斜槽選型手冊
- 服裝IE(浙江紡織服裝職業技術學院)知到智慧樹答案
- 培訓機構教務管理崗位職責
- 水利工程項目法人質量責任追究和獎懲制度
- DB44-T 2537-2024 小型水電站退役導則
評論
0/150
提交評論